

The Maneuver Control system is the final logical extension of the LiteWing Flight Positioning Module. While the Position Hold system focuses on maintaining a fixed point in space, maneuver control enables the drone to intentionally move to new positions while remaining fully autonomous and stabilized. The key distinction is that maneuver control does not introduce new low-level control logic. Instead, it leverages the same dead-reckoning position estimation and cascaded PID control used for position hold, but dynamically modifies the target position over time. Find our drone projects for beginners that teach hobbyists how to assemble, code, and fly affordable drones with step-by-step guidance
This design choice ensures that all maneuver behavior inherits the stability, safety limits, and disturbance rejection characteristics of the position hold system. As a result, maneuvers remain predictable, smooth, and resilient to environmental disturbances such as airflow, sensor noise, and minor surface irregularities. This tutorial is demonstrated using the Litewing ESP32 Drone and Litewing Drone Positioning Module.
Table of Contents
- Conceptual Overview of Maneuver Control
- Hardware Setup
- Software Setup
- Mathematical Foundation
- Cascaded PID Control Architecture
- Types of Maneuvers
- └ Directional Maneuvers
- └ Waypoint-Based Maneuvers
- Arrival Detection and Settling Behavior
- GUI Layout and Available Features
- Code Walkthrough - Dead Reckoning Maneuvers Script
- Overall Architecture Overview
- └ Configuration & Global State
- └ Target Height & Vertical Behavior
- └ Velocity Smoothing (Noise vs Responsiveness)
- └ Position PID Gains
- └ Velocity PID Gains
- └ Maximum Correction Clamp
- └ Dead Reckoning Drift Compensation
- └ Periodic Position Reset
- └ Maneuver Distance & Arrival Threshold
- └ Joystick Sensitivity & Momentum Compensation
- Testing the System
Conceptual Overview of Maneuver Control
At its core, maneuver control can be understood as position hold with a moving reference. In standard position hold, the controller continuously works to keep the drone at a single target position, typically the position where tracking was initialized. Maneuver control simply redefines that target position and allows the same control loop to converge toward the new reference.
Importantly, the drone is never commanded to “move forward” or “fly left” in an open-loop sense. Instead, it is always commanded to reduce the position error. Motion emerges naturally as a byproduct of error correction. This approach avoids timing-based motion assumptions and ensures that the drone reaches the intended location regardless of how long it takes or what disturbances occur along the way.
Hardware Setup
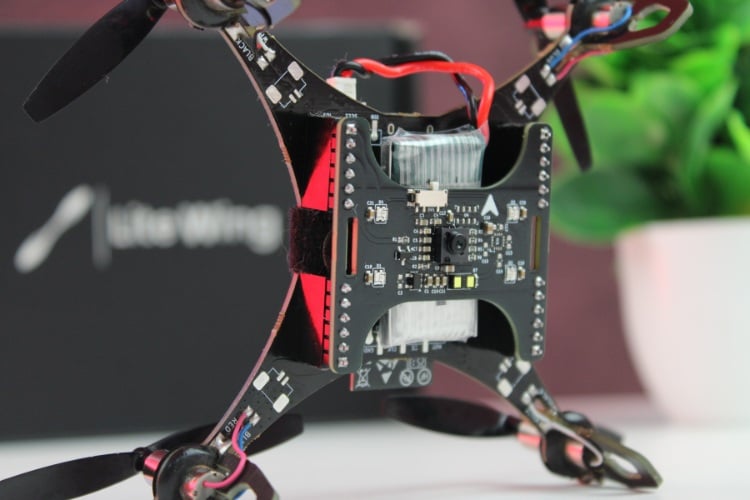
Before working with the optical position hold system, ensure your LiteWing drone is properly equipped with the Flight Positioning Module and running compatible firmware. If you have not yet installed the Module or updated the firmware, refer to the Flight Positioning Module User Guide. That document provides complete hardware installation instructions and firmware flashing procedures.
Software Setup
Setting up your development environment is critical for working with the position holding system. You need Python installed with the cflib library properly configured, and you must be able to establish CRTP communication with the LiteWing drone over UDP. The cflib library has specific prerequisites that must be met. We recommend you follow the LiteWing Python SDK Programming Guide for detailed setup instructions. That guide covers installing Python dependencies, setting up cflib, connecting to the LiteWing Wi-Fi interface, and validating your communication setup with test scripts. Completing that setup is a prerequisite for this guide.
Mathematical Foundation
Position Estimation via Dead Reckoning
The horizontal position estimate used during maneuver execution is obtained through dead reckoning by integrating velocity derived from the optical flow sensor. The mathematical formulation and filtering strategies used for this estimation are described in detail in the Optical Flow Tracking Guide and the Position Hold Guide.
In the context of maneuver control, it is sufficient to understand that the system maintains a continuously updated estimate of horizontal position in a local coordinate frame:
This estimate is relative, not absolute, and is always interpreted with respect to a defined origin.
Target Position and Error Definition
The controller maintains a target position defined as:
At every control cycle, the position error is computed as the difference between the target position and the estimated current position:
This error vector encodes both direction and distance to the desired location and serves as the primary input to the position controller.
Velocity Damping
To prevent overshoot and oscillatory motion, the controller also damps velocity. The desired velocity during maneuver execution is always zero at the target position. Therefore, the velocity error is defined as:
This term actively resists motion and provides dynamic braking as the drone approaches the target.
Combined Control Law
The final lateral correction command is computed using a cascaded control structure:
Here, the position term pulls the drone toward the target, while the velocity term damps motion to prevent overshoot. Because this formulation is identical to the position hold controller, maneuver behavior remains consistent and stable.
Cascaded PID Control Architecture
The maneuver control system relies on the same cascaded PID architecture used for position hold, ensuring that all autonomous motion obeys identical stability, damping, and safety constraints. Rather than introducing a separate maneuver-specific controller, the system reuses the existing control structure and simply changes the reference position supplied to it. This approach guarantees consistent behavior across hovering, joystick motion, and autonomous maneuvers.
The cascaded structure consists of two tightly coupled controllers: a position controller that generates corrective motion based on spatial error, and a velocity controller that actively damps motion to prevent overshoot and oscillation.
Position Controller
The position controller computes a correction based on the distance between the current estimated position and the desired target position. Its output represents the primary restoring action that drives the drone toward the target.

Where:
| ep | is the position error |
| Kp | determines how aggressively the drone moves toward the target |
| Ki | compensates for persistent steady-state bias |
| Kd | predicts error trends and provides anticipatory damping |
In practice, the proportional term dominates maneuver behavior. A higher value causes faster and more assertive motion toward the target, while a lower value results in slower, more conservative movement. Integral and derivative terms are intentionally kept small or disabled by default to avoid noise amplification and instability caused by dead-reckoning uncertainty.
The output of the position controller can be interpreted as a desired corrective velocity proportional to how far the drone is from its target.
Velocity Controller
While the position controller determines where the drone should go, the velocity controller determines how smoothly it gets there. Its primary role is to suppress overshoot and oscillation by opposing residual motion.

Where the velocity error is defined as:
![]()
This formulation assumes that the desired velocity at the target is zero. Any measured velocity, therefore, represents an error that must be damped.
The velocity controller acts as active braking. When the drone is moving quickly toward the target, the velocity term counteracts the position controller’s output, preventing excessive acceleration and reducing the likelihood of overshoot. This allows the system to use relatively high position gains while maintaining stability.
Combined Control Output
The final commanded horizontal velocity is obtained by summing the outputs of both controllers:
![]()
This combined command is then constrained by a safety limit:
![]()
Clamping the output ensures that maneuvers remain smooth and controllable even under large position errors or transient disturbances. This limit also prevents aggressive commands that could destabilize the drone or exceed actuator capabilities.
Approach Damping Near the Target
As the drone approaches a waypoint, even a well-tuned PID controller can cause small oscillations due to sensor noise and dead-reckoning error. To address this, the maneuver system applies additional damping within a proximity zone around the target.
When the distance to the target satisfies:
![]()
The commanded velocity is scaled:
![]()
This creates a soft arrival envelope around the target position. Instead of abruptly stopping or repeatedly correcting small errors, the drone gently reduces its motion as it enters the final approach region. The result is smoother settling behavior, reduced oscillation, and improved stability at the endpoint of a maneuver.
Reference Frame Reset and Its Importance
Before executing any maneuver, the system resets the internal position estimate to zero. This does not physically move the drone; it only redefines the coordinate system such that the drone’s current location becomes the new origin. Conceptually, this means:
![]()
This reset serves several important purposes. First, it ensures that all maneuvers are relative rather than absolute, which is essential when using dead reckoning. Second, it prevents long-term drift from accumulating across multiple maneuvers. Third, it allows the operator to think in intuitive commands such as “move forward 0.5 meters,” regardless of where the drone has been previously.
Integral terms inside the PID controller are intentionally preserved during this reset. This allows previously learned trim and bias compensation to remain active, improving consistency across maneuvers.
Types of Maneuvers
Directional Maneuvers
Directional maneuvers are single-target maneuvers that move the drone a fixed distance along one axis. Each maneuver defines a new target position relative to the reset origin.
| Maneuver | Target Position |
| Forward | (0, +d) |
| Backward | (0, −d) |
| Left | (+d, 0) |
| Right | (−d, 0) |
Once the target is set, the controller automatically accelerates the drone toward the target, slows as it approaches, and stabilizes at the destination. No explicit timing or velocity commands are involved.
Waypoint-Based Maneuvers
Waypoint-based maneuvers extend this concept by defining a sequence of target positions. The controller processes these waypoints sequentially, treating each as a temporary position hold target. After reaching a waypoint, the system stabilizes briefly before advancing to the next one.
![]()
This approach transforms the position hold controller into a local waypoint navigator without requiring GPS, mapping, or global localization.
Arrival Detection and Settling Behavior
Arrival at a target position is determined using the Euclidean distance between the current position and the target:

The tolerance value ε is deliberately non-zero to account for sensor noise and dead-reckoning uncertainty. Attempting to reach an exact mathematical point would cause continuous oscillation.
As the drone enters the final approach region, control output is intentionally reduced. This creates a zone that allows the drone to settle naturally instead of overshooting and correcting repeatedly.
GUI Layout and Available Features
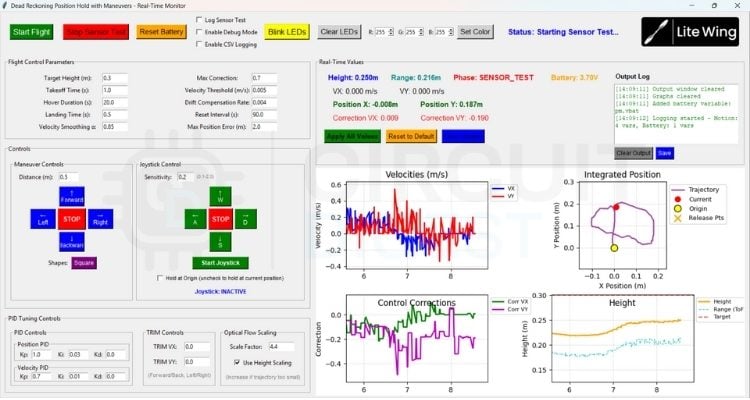
Every interactive element maps directly to a conceptual operation within the control architecture. The interface is organized into four primary areas: flight control and safety controls, maneuver and joystick controls, real-time telemetry display, and visualization and logging. This structure ensures a clear separation between command input, system feedback, and diagnostic tools.
Flight Control Section
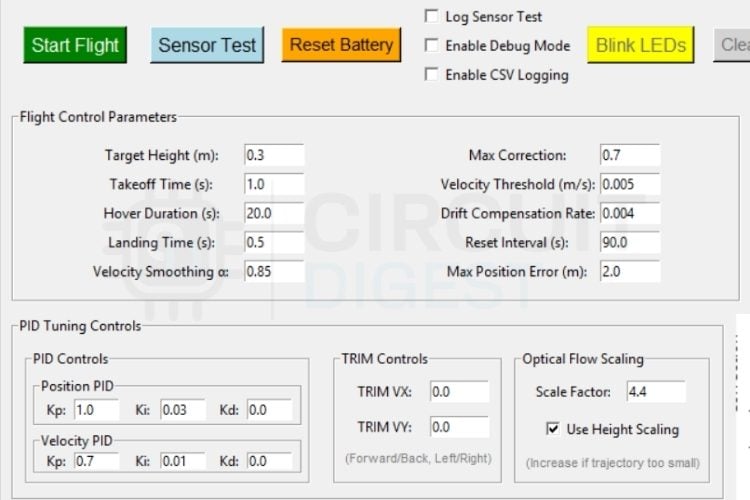
This section allows the user to start and stop autonomous flight and to perform sensor validation. The Sensor Test feature enables verification of optical flow, height sensing, and battery status without spinning the motors. This test is mandatory before maneuver execution and serves as the first line of safety. A Debug Mode option allows the full control logic to run without motor output, enabling safe observation of sensor data, position estimation, and PID behavior while the system remains on the ground.
Maneuver Control Panel

The maneuver panel defines motion intent. A distance input specifies the displacement used by all directional and shape maneuvers; this value is expressed in meters and affects only the target position, not the speed. Directional buttons trigger single-target maneuvers by redefining the target position, while shape buttons load predefined waypoint sequences and execute them autonomously. A STOP button immediately cancels maneuver execution, freezes the target at the current position, and returns the system to position hold. All maneuver commands may be issued while the drone is already airborne, in which case the target position is updated dynamically without restarting the flight.
Joystick Control Section
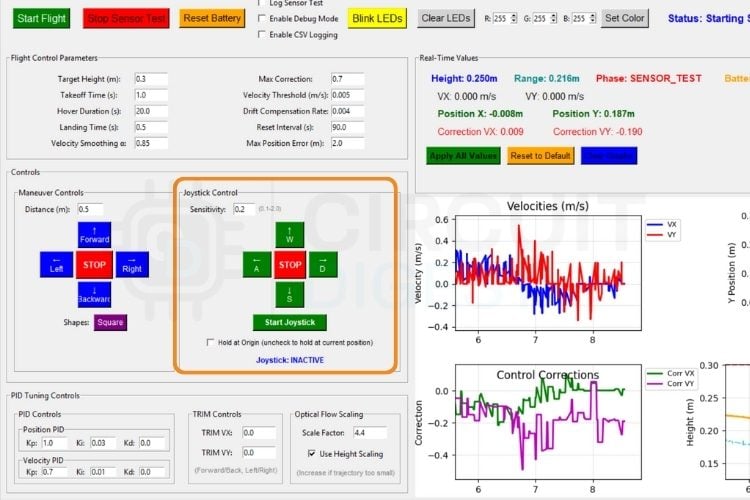
Joystick control enables continuous manual motion while maintaining position stabilization. Rather than directly commanding velocity, joystick inputs incrementally adjust the target position. When input ceases, the system predicts momentum and defines a new hold position, preventing rebound or counter-motion. An optional setting allows the user to choose whether releasing the joystick holds the current position or returns to the original origin.
Real-Time Telemetry Display
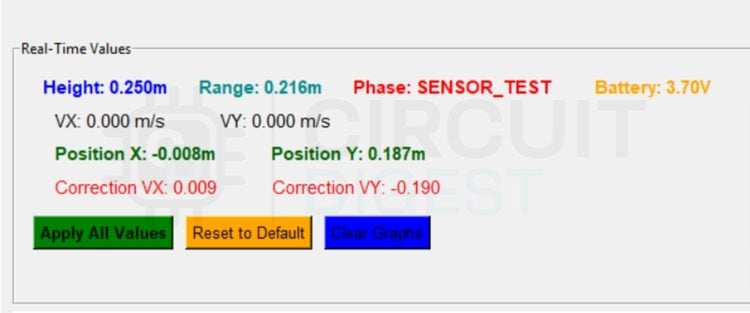
The telemetry panel provides continuous feedback on height and range sensor readings, estimated velocities, integrated position, active correction outputs, current flight phase, and battery voltage. This information allows the operator to observe how the control system responds to maneuvers and external disturbances in real time.
Visualization and Logging
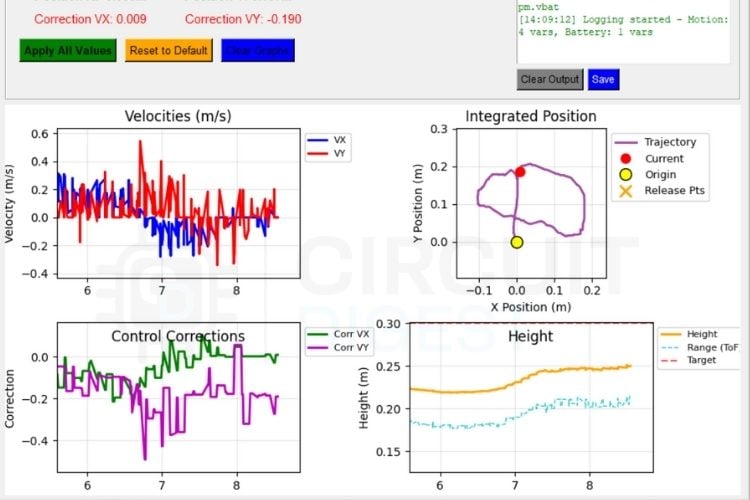
Visualization tools plot velocity, position trajectory, correction commands, and height over time. Together, these plots provide a comprehensive view of system behavior and are invaluable for tuning and debugging. Optional CSV logging enables flight data to be recorded for offline analysis.
System State Flow
Maneuver control operates within a structured sequence of flight states. The system begins in the IDLE state, where no flight activity occurs, then transitions to TAKEOFF as the vehicle ascends to the target height. Once the desired height is reached, the system enters STABILIZING, allowing height and sensor data to settle.
After stabilization, POSITION HOLD maintains a fixed reference point. When movement toward a target is commanded, the system enters MANEUVER ACTIVE, followed by WAYPOINT HOLD to stabilize at a designated waypoint. The flight concludes with LANDING, a controlled descent to the ground. At any point, an ERROR state may be triggered due to safety or communication faults. Maneuver execution is permitted only when sensor data is valid, height is stable, and position integration is enabled.
Code Walkthrough - Dead Reckoning Maneuvers Script
This section provides a comprehensive walkthrough of the dead-reckoning-maneuvers.py script. The goal is not only to explain what the code does, but why each subsystem exists, how the pieces interact, and what assumptions must be understood before tuning or extending the system.


.jpg)
The script builds on an optical-flow-based dead reckoning position hold controller and adds directional maneuvers, waypoint shapes, joystick control, visualization, logging, and safety monitoring, all wrapped in a single GUI application.
Overall Architecture Overview
The dead-reckoning-maneuvers.py script is a multi-layer flight control application that combines sensing, estimation, control, user interaction, visualization, and safety into a single coherent system. Rather than being a simple “flight script,” it functions as a ground-station-style control application tightly coupled to the drone via CRTP.
At a high level, the architecture is composed of the following interacting subsystems:
| Subsystem | Role in the System |
| Sensor Interface | Streams optical flow, height, and battery data from the drone via CRTP |
| State Estimation | Converts raw sensor data into velocity and dead-reckoned position |
| Position Hold Controller | Cascaded PID system that maintains or restores position |
| Maneuver Generator | Modifies target position to execute directional and shape maneuvers |
| Joystick Control Layer | Converts user input into controlled position shifts |
| NeoPixel LED Feedback | Provides immediate visual feedback of flight state and modes |
| Safety & Monitoring | Battery checks, sensor heartbeat monitoring, emergency stops |
| GUI & Visualization | Real-time plots, parameter tuning, and system state display |
| Data Logging | CSV logging for post-flight analysis and tuning |
The key architectural principle is that every motion mode position hold, joystick movement, maneuvers, and shapes ultimately feed into the same position hold PID controller.
Configuration & Global State
This section explains how key configuration parameters and global variables influence system behavior. Each parameter is shown with a code snippet, followed by an explanation of what changes when you modify it and what the user should expect to observe in flight or in the GUI.
Target Height & Vertical Behavior
TARGET_HEIGHT = 0.3 # Target hover height in meters
cf.commander.send_hover_setpoint(vx, vy, 0, TARGET_HEIGHT)The TARGET_HEIGHT parameter defines the vertical reference that the drone maintains throughout the entire flight. Once takeoff is complete, the height controller continuously works to keep the drone at this altitude, regardless of whether the system is in position hold, executing a maneuver, or responding to joystick input. Importantly, maneuver logic never alters this value, which means all horizontal motion assumes that vertical stabilization is already complete and reliable.
Choosing an appropriate target height is critical because the optical flow sensor’s accuracy is highly dependent on altitude. If the drone flies too low, the sensor may not see enough surface texture, and if it flies too high, the pixel motion becomes too small to measure accurately.
| Change | Observed Effect |
| Increase value | Drone hovers higher |
| Decrease value | Drone flies closer to ground |
| Too low (<0.1 m) | Optical flow becomes unreliable |
| Too high (>3 m) | Optical flow loses accuracy |
In practice, a poor height choice directly degrades position hold and maneuver accuracy, even if all other parameters are tuned correctly.
Velocity Smoothing (Noise vs Responsiveness)
VELOCITY_SMOOTHING_ALPHA = 0.85
smoothed = (history[0] * alpha) + (history[1] * (1 - alpha))
Optical flow velocity measurements are inherently noisy due to lighting variations, surface texture, and sensor quantization. The VELOCITY_SMOOTHING_ALPHA parameter controls how much of this noise is filtered before the velocity is used for position integration and control. Conceptually, this parameter balances responsiveness versus stability.
A lower value allows rapid changes in velocity to pass through, making the drone respond quickly but also amplifying noise. A higher value produces smoother motion at the cost of delayed response, which can make maneuvers feel sluggish.
| Alpha Value | Result |
| Low (0.3-0.5) | Fast response, noisy motion |
| Medium (0.7-0.85) | Balanced behavior (recommended) |
| High (0.9+) | Very smooth but sluggish |
This effect is clearly visible in the GUI: excessive noise produces jittery velocity plots, while excessive smoothing causes noticeable lag during direction changes and maneuver initiation.
Position PID Gains
POSITION_KP = 1.0
POSITION_KI = 0.03
POSITION_KD = 0.0
position_p_x = position_error_x * POSITION_KP
position_integral_x += position_error_x * CONTROL_UPDATE_RATE
The position PID controller determines how strongly the drone reacts to displacement from its target position. The proportional term (POSITION_KP) provides the primary restoring force, pulling the drone back toward the target whenever a position error exists. The integral term (POSITION_KI) accumulates persistent error over time and helps eliminate slow drift caused by sensor bias or trim imbalance. The derivative term is intentionally disabled by default because dead-reckoning noise tends to make derivative action unstable.
| Gain | What It Changes |
| POSITION_KP | How aggressively the drone moves toward target |
| POSITION_KI | How well steady drift is corrected |
| POSITION_KD | Rarely used (noise-sensitive) |
Velocity PID Gains
VELOCITY_KP = 0.7
VELOCITY_KI = 0.01
velocity_p_x = velocity_error_x * VELOCITY_KPThe velocity PID controller acts as an active damping system. While the position controller commands motion toward the target, the velocity controller resists excessive speed and prevents overshoot. This separation of responsibilities is what allows the system to remain stable even when position gains are relatively high.
| Change | Result |
| Increase VELOCITY_KP | More damping, less overshoot |
| Too high | Sluggish motion |
| Too low | Bounce / overshoot |
The key insight is that velocity PID is what makes aggressive position correction usable. Without sufficient velocity damping, even moderate position gains would result in oscillation.
Maximum Correction Clamp
MAX_CORRECTION = 0.7
total_vx = max(-MAX_CORRECTION, min(MAX_CORRECTION, total_vx))
total_vy = max(-MAX_CORRECTION, min(MAX_CORRECTION, total_vy))The MAX_CORRECTION parameter limits the maximum horizontal velocity command that the controller can issue. This acts as a hard safety envelope, ensuring that even large position errors or temporary sensor glitches cannot produce dangerously aggressive motion.
| Value | Effect |
| Low (0.2-0.4) | Very gentle motion |
| Medium (0.6-0.8) | Natural maneuver speed |
| Too high (>1.0) | Risk of instability |
This limit exists to prevent runaway corrections, protect against transient sensor failures, and keep maneuvers smooth, predictable.
Dead Reckoning Drift Compensation
DRIFT_COMPENSATION_RATE = 0.004
integrated_position_x -= integrated_position_x * DRIFT_COMPENSATION_RATE * dt
integrated_position_y -= integrated_position_y * DRIFT_COMPENSATION_RATE * dtDead reckoning inevitably accumulates error over time. Drift compensation introduces a very weak decay term that slowly pulls the estimated position back toward zero only when the drone is nearly stationary. This helps cancel long-term drift without interfering with real motion.
| Behavior | Explanation |
| Slowly pulls position toward zero | Cancels accumulated drift |
| Only active at low velocity | Does not affect real motion |
It is important to understand that this is not corrective control. It does not command the drone to move; it only modifies the internal estimate, acting like a weak virtual spring.
Periodic Position Reset
PERIODIC_RESET_INTERVAL = 90.0
if time.time() - last_reset_time >= PERIODIC_RESET_INTERVAL:
integrated_position_x = 0.0
integrated_position_y = 0.0To prevent unbounded error accumulation during long flights, the system periodically resets the integrated position estimate. This reset is purely mathematical and does not result in any physical movement of the drone.
Maneuver Distance & Arrival Threshold
MANEUVER_DISTANCE = 0.5
MANEUVER_THRESHOLD = 0.10
if distance_to_target < MANEUVER_THRESHOLD:
maneuver_active = False
The maneuver distance defines how far the target position is shifted relative to the current origin, while the arrival threshold defines how close the drone must get before the maneuver is considered complete.
| Parameter | Effect |
| Distance | How far the drone moves |
| Threshold | How close is “close enough” |
A non-zero threshold is mandatory because dead-reckoning systems cannot converge to an exact mathematical point. Without it, the controller would endlessly chase sensor noise.
Joystick Sensitivity & Momentum Compensation
JOYSTICK_SENSITIVITY = 0.2
MOMENTUM_COMPENSATION_TIME = 0.10
target_position_x += joystick_dx * JOYSTICK_SENSITIVITY
target_position_y += joystick_dy * JOYSTICK_SENSITIVITYJoystick input modifies the target position, not the velocity directly. Sensitivity controls how much the target shifts per input step, while momentum compensation predicts stopping distance when keys are released to prevent counter-movement.
| Change | Result |
| Higher sensitivity | Faster manual motion |
| Lower sensitivity | Precision control |
| Momentum compensation | Prevents rebound after key release |
This design allows joystick control to feel natural while remaining fully stabilized by the position hold controller.
Testing the System
| Issue | Observed Behavior | Likely Cause | Recommended Action |
| Position Hold Drift | The drone drifts steadily in one direction even though position hold mode is enabled. | Unsuitable surface texture, operation outside optical flow height range, air disturbances, or incorrect trim values (TRIM_VX, TRIM_VY). | Use a textured, non-reflective surface, maintain height between 0.08–3 m, remove airflow sources, and fine-tune TRIM_VX and TRIM_VY. |
| Oscillation | The drone overshoots and oscillates around the target. | POSITION_KP too high, insufficient velocity damping. | Reduce POSITION_KP in 0.1 steps and increase VELOCITY_KP if needed. |
| Sensor Data Not Ready | Sensor test or flight initialization fails. | CRTP logging failure, incompatible firmware, missing log variables, shield connection issues, or network problems. | Verify firmware compatibility, shield installation, network connectivity, and restart both drone and PC. |
| Battery Warnings | The system refuses to arm or start flight. | Battery voltage below LOW_BATTERY_THRESHOLD. | Fully charge the battery before flight. |
| Large Position Errors | Trajectory plot diverges rapidly from origin. | Poor optical flow tracking due to surface, lighting, height, or sensor fault. | Improve surface texture and lighting, verify height range, inspect optical flow sensor. |
| Debug Mode Active | Control logic runs but motors do not spin. | DEBUG_MODE intentionally enabled. | Disable DEBUG_MODE to allow motor output, or keep it enabled for safe testing. |
Document Index
Complete Project Code
"""
Dead Reckoning Maneuvers - Full-Featured Control Script
========================================================
A comprehensive script for optical flow-based position hold with
advanced maneuver capabilities. Uses dead reckoning with PID controllers
to maintain the drone's position and execute directional maneuvers.
This script provides a full-featured GUI for controlling the drone with
real-time visualization of sensor data, position tracking, and various
control modes including manual joystick control and autonomous shapes.
Features:
- Sensor Test to arm/prepare the drone
- Optical flow-based position hold
- Adjustable TRIM values, Height, and PID parameters
- Real-time position, velocity, and correction feedback
- Safety checks for battery and sensors
- NeoPixel LED control for visual feedback
- Directional maneuvers (Forward, Backward, Left, Right)
- Autonomous shape execution
- Joystick control with multiple modes
- CSV data logging for flight analysis
- Real-time matplotlib plotting
Usage:
1. Connect to the drone via UDP
2. Click "Sensor Test" to arm and verify sensors
3. Adjust parameters if needed (TRIM, Height, PID)
4. Click "Start Position Hold" to takeoff and hover
5. Use directional buttons or joystick for maneuvers
6. The drone will maintain its position automatically
7. Click "Stop" or press Enter for emergency stop
Author: Dharageswaran S
Version: 1.0
"""
import time
import threading
import cflib.crtp
from cflib.crazyflie import Crazyflie
from cflib.crazyflie.log import LogConfig
from cflib.crazyflie.syncCrazyflie import SyncCrazyflie
import tkinter as tk
from tkinter import ttk
from matplotlib.backends.backend_tkagg import FigureCanvasTkAgg
from matplotlib.figure import Figure
import matplotlib.animation as animation
from matplotlib.pylab import f
import numpy as np
import csv
import math
from datetime import datetime
import os
from PIL import Image, ImageTk
from collections import deque
import threading
# === CONSTANTS ===
# CRTP and NeoPixel constants
CRTP_PORT_NEOPIXEL = 0x09
NEOPIXEL_CHANNEL_SET_PIXEL = 0x00
NEOPIXEL_CHANNEL_SHOW = 0x01
NEOPIXEL_CHANNEL_CLEAR = 0x02
NEOPIXEL_CHANNEL_BLINK = 0x03
NP_SEND_RETRIES = 3
NP_PACKET_DELAY = 0.02
NP_LINK_SETUP_DELAY = 0.12
# === CONFIGURATION PARAMETERS ===
DRONE_URI = "udp://192.168.43.42"
TARGET_HEIGHT = 0.3 # Target hover height in meters
TAKEOFF_TIME = 1.0 # Time to takeoff and stabilize (reduced for steeper ramp)
HOVER_DURATION = 20.0 # How long to hover with position hold
LANDING_TIME = 0.5 # Time to land
# Debug mode - set to True to disable motors (sensors and logging still work)
DEBUG_MODE = False
# Height sensor safety check - set to False to disable emergency stop during takeoff/stabilized
ENABLE_HEIGHT_SENSOR_SAFETY = False
# Filtering strength for velocity smoothing (0.0 = no smoothing, 1.0 = max smoothing)
VELOCITY_SMOOTHING_ALPHA = 0.85 # Default: 0.7 (previously hardcoded)
# CSV Logging - set to False to disable CSV file generation
DRONE_CSV_LOGGING = False
# Takeoff Ramp - set to False to disable smooth altitude climb (direct target height)
ENABLE_TAKEOFF_RAMP = False
# Basic trim corrections
TRIM_VX = 0.0 # Forward/backward trim correction
TRIM_VY = 0.0 # Left/right trim correction
# Battery monitoring
LOW_BATTERY_THRESHOLD = 2.9 # Low battery warning threshold in volts
# Height sensor safety
HEIGHT_SENSOR_MIN_CHANGE = (
0.005 # Minimum height change expected during takeoff (meters)
)
# === DEAD RECKONING POSITION CONTROL PARAMETERS ===
# PID Controller Parameters
# Start here, then increase gradually
POSITION_KP = 1.0
POSITION_KI = 0.03 # Increased from 0.01 for better drift correction
POSITION_KD = 0.0
VELOCITY_KP = 0.7 # Increased from 0.5 for better damping
VELOCITY_KI = 0.01
VELOCITY_KD = 0.0
# Control limits
MAX_CORRECTION = 0.7 # Maximum control correction allowed
VELOCITY_THRESHOLD = 0.005 # Consider drone "stationary" below this velocity
DRIFT_COMPENSATION_RATE = 0.004 # Gentle pull toward zero when moving slowly
# Position integration and reset
PERIODIC_RESET_INTERVAL = 90.0 # Reset integrated position every 5 seconds
MAX_POSITION_ERROR = 2.0 # Clamp position error to prevent runaway
# Sensor parameters
SENSOR_PERIOD_MS = 10 # Motion sensor update rate
DT = SENSOR_PERIOD_MS / 1000.0
CONTROL_UPDATE_RATE = 0.02 # 50Hz control loop
# Velocity calculation constants
DEG_TO_RAD = 3.1415926535 / 180.0
# Optical flow scaling - adjust these to match your sensor/setup
OPTICAL_FLOW_SCALE = (
4.4 # Empirical scaling factor (adjust based on real vs measured distance)
)
USE_HEIGHT_SCALING = True # Set to False to disable height dependency
# === MANEUVER PARAMETERS ===
MANEUVER_DISTANCE = 0.5 # Default distance
MANEUVER_THRESHOLD = 0.10 # Within 5cm is close enough
WAYPOINT_TIMEOUT = 60.0 # Seconds before aborting mission
WAYPOINT_STABILIZATION_TIME = 0.5 # Seconds to hover at each corner
JOYSTICK_SENSITIVITY = 0.2
# === JOYSTICK MOMENTUM COMPENSATION ===
# When keys are released in "Hold at Current Position" mode, these parameters help prevent counter-movement
MOMENTUM_COMPENSATION_TIME = (
0.10 # Seconds of velocity to predict stopping position (0.05-0.15 recommended)
)
SETTLING_DURATION = (
0.1 # Time to use gentler corrections after key release (0.1-0.3 seconds)
)
SETTLING_CORRECTION_FACTOR = (
0.5 # Correction strength during settling period (0.3-0.7, lower = gentler)
)
# === FIRMWARE PARAMETERS (Z-AXIS) ===
# Set to True to send these values to the drone on connection
ENABLE_FIRMWARE_PARAMS = False
FW_THRUST_BASE = 24000 # Default: 24000. Increase if drone feels heavy (e.g., 26000)
FW_Z_POS_KP = 1.6 # Default: 1.6. Height position gain
FW_Z_VEL_KP = 15.0 # Default: 22.0. Vertical velocity damping (stop bouncing)
# === OUTPUT WINDOW LOG ===
Output_Window = True # Set to True to enable output log window, False to disable
# === GLOBAL VARIABLES ===
# Sensor data
current_height = 0.0
current_range_height = 0.0
motion_delta_x = 0
motion_delta_y = 0
sensor_data_ready = False
last_sensor_heartbeat = time.time() # Track last received packet
DATA_TIMEOUT_THRESHOLD = 0.2 # Max allowed time between sensor packets (seconds)
# Log file
log_file = None
log_writer = None
# Battery voltage data
current_battery_voltage = 0.0
battery_data_ready = False
# Velocity tracking
current_vx = 0.0
current_vy = 0.0
velocity_x_history = [0.0, 0.0]
velocity_y_history = [0.0, 0.0]
# Dead reckoning position integration
integrated_position_x = 0.0
integrated_position_y = 0.0
last_integration_time = time.time()
last_reset_time = time.time()
# Control corrections
current_correction_vx = 0.0
current_correction_vy = 0.0
# PID Controller state variables
position_integral_x = 0.0
position_integral_y = 0.0
position_derivative_x = 0.0
position_derivative_y = 0.0
last_position_error_x = 0.0
last_position_error_y = 0.0
velocity_integral_x = 0.0
velocity_integral_y = 0.0
velocity_derivative_x = 0.0
velocity_derivative_y = 0.0
last_velocity_error_x = 0.0
last_velocity_error_y = 0.0
# Flight state
flight_phase = "IDLE"
flight_active = False
sensor_test_active = False # New variable for sensor test state
scf_instance = None
position_integration_enabled = False
# Maneuver state
maneuver_active = False
target_position_x = 0.0
target_position_y = 0.0
# Shape maneuver state
shape_active = False
shape_waypoints = []
shape_index = 0
waypoint_start_time = 0.0
# Data history for plotting
max_history_points = 300 # Increased for better visualization
time_history = deque(maxlen=max_history_points)
velocity_x_history_plot = deque(maxlen=max_history_points)
velocity_y_history_plot = deque(maxlen=max_history_points)
position_x_history = deque(maxlen=max_history_points)
position_y_history = deque(maxlen=max_history_points)
correction_vx_history = deque(maxlen=max_history_points)
correction_vy_history = deque(maxlen=max_history_points)
height_history = deque(maxlen=max_history_points)
range_height_history = deque(maxlen=max_history_points)
# Complete trajectory history (never trimmed for data, but downsampled for UI)
MAX_PLOT_TRAJECTORY_POINTS = 5000 # Limit points drawn on 2D plot to prevent lag
complete_trajectory_x = []
complete_trajectory_y = []
key_release_points = [] # Store (x, y) tuples of release points
start_time = None
neo_controller = None
data_lock = threading.Lock() # Protect shared data structures
# Debug counter for motion callback
debug_counter = 0
# Global logger function - can be set to GUI's log_to_output method
global_logger = None
def set_global_logger(logger_func):
"""Set the global logger function to redirect messages to GUI output window"""
global global_logger
global_logger = logger_func
def log_message(message):
"""Log a message using the global logger if available, otherwise print to console"""
if global_logger is not None:
try:
global_logger(message)
except Exception:
# Fallback to print if logger fails
print(message)
else:
print(message)
def check_link_safety(cf, logger=None):
"""
Check if the Crazyflie is still connected and sensor data is fresh.
Returns True if safe, False otherwise.
"""
global flight_active, sensor_test_active
# 1. Connection check
if not cf.is_connected():
if logger:
logger("CRITICAL: Crazyflie disconnected!")
return False
# 2. Sensor heartbeat check (only if not in debug mode)
if not DEBUG_MODE and sensor_data_ready:
elapsed_since_last_data = time.time() - last_sensor_heartbeat
if elapsed_since_last_data > DATA_TIMEOUT_THRESHOLD:
if logger:
logger(
f"CRITICAL: Sensor data timeout! ({elapsed_since_last_data:.2f}s delay)"
)
return False
return True
# === HELPER FUNCTIONS ===
# Inline robust CRTP send + NeoPixel helpers (adapted from neopixel_control.py)
def _send_crtp_with_fallback(cf, port, channel, payload: bytes):
header = ((port & 0x0F) << 4) | (channel & 0x0F)
class _PacketObj:
def __init__(self, header, data: bytes):
self.header = header
self.data = data
try:
self.datat = tuple(data)
except Exception:
self.datat = tuple()
def is_data_size_valid(self):
return len(self.data) <= 30
@property
def size(self):
return len(self.data)
def raw(self):
return bytes([self.header]) + self.data
pkt_obj = _PacketObj(header, payload)
# 1) Crazyflie.send_packet if available
try:
send_fn = getattr(cf, "send_packet", None)
if callable(send_fn):
try:
send_fn(pkt_obj)
return
except Exception:
pass
except Exception:
pass
# 2) low-level link object: _link or link
try:
link = getattr(cf, "_link", None) or getattr(cf, "link", None)
if link is not None:
if hasattr(link, "sendPacket"):
try:
link.sendPacket(pkt_obj)
return
except Exception:
pass
if hasattr(link, "send_packet"):
try:
link.send_packet(pkt_obj)
return
except Exception:
pass
except Exception:
pass
# 3) cflib.crtp.send_packet fallback (object or raw bytes)
try:
import cflib.crtp as _crtp
sendp = getattr(_crtp, "send_packet", None)
if callable(sendp):
try:
sendp(pkt_obj)
return
except Exception:
try:
sendp(bytes([pkt_obj.header]) + pkt_obj.data)
return
except Exception:
pass
except Exception:
pass
raise RuntimeError(
"Unable to send CRTP packet: no send method available on Crazyflie instance"
)
# NeoPixel utility wrappers that reuse the same Crazyflie link
def np_set_pixel(cf, index, r, g, b):
_send_crtp_with_fallback(
cf, CRTP_PORT_NEOPIXEL, NEOPIXEL_CHANNEL_SET_PIXEL, bytes([index, r, g, b])
)
def np_show(cf):
_send_crtp_with_fallback(cf, CRTP_PORT_NEOPIXEL, NEOPIXEL_CHANNEL_SHOW, b"")
def np_clear(cf):
_send_crtp_with_fallback(cf, CRTP_PORT_NEOPIXEL, NEOPIXEL_CHANNEL_CLEAR, b"")
def np_start_blink(cf, on_ms=500, off_ms=500):
data = bytes(
[1, (on_ms >> 8) & 0xFF, on_ms & 0xFF, (off_ms >> 8) & 0xFF, off_ms & 0xFF]
)
_send_crtp_with_fallback(cf, CRTP_PORT_NEOPIXEL, NEOPIXEL_CHANNEL_BLINK, data)
def np_stop_blink(cf):
data = bytes([0, 0, 0, 0, 0])
_send_crtp_with_fallback(cf, CRTP_PORT_NEOPIXEL, NEOPIXEL_CHANNEL_BLINK, data)
def np_set_all(cf, r, g, b):
"""Set all NeoPixels to same RGB using SET_ALL CRTP channel."""
# The firmware uses the special broadcast index 0xFF on the SET_PIXEL
# channel to indicate "set all". That avoids adding a channel value
# beyond the 2-bit channel field in the CRTP packet.
_send_crtp_with_fallback(
cf,
CRTP_PORT_NEOPIXEL,
NEOPIXEL_CHANNEL_SET_PIXEL,
bytes([0xFF, r & 0xFF, g & 0xFF, b & 0xFF]),
)
def _try_send_with_retries(cf, fn, *args, retries=NP_SEND_RETRIES, logger=None):
"""Call a np_* function with retries and small inter-packet delay.
fn is expected to be a function taking (cf, *args).
Returns True on success, False on failure.
"""
last_exc = None
fn_name = getattr(fn, "__name__", repr(fn))
for attempt in range(1, retries + 1):
try:
fn(cf, *args)
return True
except Exception as e:
last_exc = e
if logger:
logger(f"[NeoPixel] Attempt {attempt} failed: {e}")
time.sleep(NP_PACKET_DELAY)
if logger:
logger(f"[NeoPixel] Failed after {retries} attempts: {last_exc}")
return False
def calculate_velocity(delta_value, altitude):
"""Convert optical flow delta to linear velocity"""
if altitude <= 0:
return 0.0
if USE_HEIGHT_SCALING:
# Original height-dependent calculation
velocity_constant = (5.4 * DEG_TO_RAD) / (30.0 * DT)
velocity = delta_value * altitude * velocity_constant
else:
# Simplified calculation without height dependency
# Using empirical scaling factor
velocity = delta_value * OPTICAL_FLOW_SCALE * DT
return velocity
def smooth_velocity(new_velocity, history):
"""Simple 2-point smoothing filter with adjustable alpha"""
history[1] = history[0]
history[0] = new_velocity
alpha = VELOCITY_SMOOTHING_ALPHA # Use the global variable
smoothed = (history[0] * alpha) + (history[1] * (1 - alpha))
if abs(smoothed) < VELOCITY_THRESHOLD:
smoothed = 0.0
return smoothed
def integrate_position(vx, vy, dt):
"""Dead reckoning: integrate velocity to position"""
global integrated_position_x, integrated_position_y
if dt <= 0 or dt > 0.1:
return
# Simple integration
integrated_position_x += vx * dt
integrated_position_y += vy * dt
# Apply drift compensation when moving slowly
velocity_magnitude = (vx * vx + vy * vy) ** 0.5
if velocity_magnitude < VELOCITY_THRESHOLD * 2:
integrated_position_x -= integrated_position_x * DRIFT_COMPENSATION_RATE * dt
integrated_position_y -= integrated_position_y * DRIFT_COMPENSATION_RATE * dt
# Clamp position error
integrated_position_x = max(
-MAX_POSITION_ERROR, min(MAX_POSITION_ERROR, integrated_position_x)
)
integrated_position_y = max(
-MAX_POSITION_ERROR, min(MAX_POSITION_ERROR, integrated_position_y)
)
def periodic_position_reset():
"""Reset integrated position every few seconds"""
global integrated_position_x, integrated_position_y, last_reset_time
current_time = time.time()
if current_time - last_reset_time >= PERIODIC_RESET_INTERVAL:
integrated_position_x = 0.0
integrated_position_y = 0.0
last_reset_time = current_time
return True
return False
def apply_firmware_parameters(cf, logger=None):
"""
Apply custom vertical PID and thrust parameters to the drone's brain.
Only takes effect if ENABLE_FIRMWARE_PARAMS is True.
"""
if not ENABLE_FIRMWARE_PARAMS:
return
try:
if logger: logger("Applying custom firmware parameters (Z-Axis/Thrust)...")
# Set parameters as strings since cflib expects that/it's safer for radio transport
cf.param.set_value('posCtlPid.thrustBase', str(FW_THRUST_BASE))
cf.param.set_value('posCtlPid.zKp', str(FW_Z_POS_KP))
cf.param.set_value('velCtlPid.vzKp', str(FW_Z_VEL_KP))
# Brief wait to ensure the drone processed the parameters
time.sleep(0.2)
# Verify the most important one
actual_thrust = cf.param.get_value('posCtlPid.thrustBase')
if logger: logger(f"Firmware configured: thrustBase={actual_thrust}, zKp={FW_Z_POS_KP}, vzKp={FW_Z_VEL_KP}")
except Exception as e:
if logger: logger(f"WARNING: Failed to set firmware parameters: {str(e)}")
def reset_position_tracking(reset_integrals=True):
"""Reset integrated position tracking to prevent sensor drift"""
global integrated_position_x, integrated_position_y, last_integration_time, last_reset_time, position_integration_enabled
global position_integral_x, position_integral_y, velocity_integral_x, velocity_integral_y
global last_position_error_x, last_position_error_y, last_velocity_error_x, last_velocity_error_y
global last_sensor_heartbeat
integrated_position_x = 0.0
integrated_position_y = 0.0
last_integration_time = time.time()
last_sensor_heartbeat = time.time()
last_reset_time = time.time()
position_integration_enabled = True
if reset_integrals:
# Reset PID state - Use this only at the very start of a flight
position_integral_x = 0.0
position_integral_y = 0.0
velocity_integral_x = 0.0
velocity_integral_y = 0.0
last_position_error_x = 0.0
last_position_error_y = 0.0
last_velocity_error_x = 0.0
last_velocity_error_y = 0.0
def calculate_position_hold_corrections(target_x=None, target_y=None):
"""Calculate control corrections using PID controllers"""
global current_correction_vx, current_correction_vy
global position_integral_x, position_integral_y, position_derivative_x, position_derivative_y
global last_position_error_x, last_position_error_y
global velocity_integral_x, velocity_integral_y, velocity_derivative_x, velocity_derivative_y
global last_velocity_error_x, last_velocity_error_y
global maneuver_active, target_position_x, target_position_y
if not sensor_data_ready or current_height <= 0:
current_correction_vx = 0.0
current_correction_vy = 0.0
return 0.0, 0.0
# Fallback to global targets if not provided explicitly
if target_x is None: target_x = target_position_x
if target_y is None: target_y = target_position_y
# Calculate position errors (negative because we want to correct toward target)
position_error_x = -(integrated_position_x - target_x)
position_error_y = -(integrated_position_y - target_y)
# Calculate velocity errors (negative because we want to dampen velocity)
velocity_error_x = -current_vx
velocity_error_y = -current_vy
# Position PID Controller
# Proportional
position_p_x = position_error_x * POSITION_KP
position_p_y = position_error_y * POSITION_KP
# Integral (with anti-windup)
position_integral_x += position_error_x * CONTROL_UPDATE_RATE
position_integral_y += position_error_y * CONTROL_UPDATE_RATE
# Anti-windup: limit integral term
position_integral_x = max(-0.1, min(0.1, position_integral_x))
position_integral_y = max(-0.1, min(0.1, position_integral_y))
position_i_x = position_integral_x * POSITION_KI
position_i_y = position_integral_y * POSITION_KI
# Derivative
position_derivative_x = (
position_error_x - last_position_error_x
) / CONTROL_UPDATE_RATE
position_derivative_y = (
position_error_y - last_position_error_y
) / CONTROL_UPDATE_RATE
position_d_x = position_derivative_x * POSITION_KD
position_d_y = position_derivative_y * POSITION_KD
# Store current errors for next iteration
last_position_error_x = position_error_x
last_position_error_y = position_error_y
# Velocity PID Controller
# Proportional
velocity_p_x = velocity_error_x * VELOCITY_KP
velocity_p_y = velocity_error_y * VELOCITY_KP
# Integral (with anti-windup)
velocity_integral_x += velocity_error_x * CONTROL_UPDATE_RATE
velocity_integral_y += velocity_error_y * CONTROL_UPDATE_RATE
# Anti-windup: limit integral term
velocity_integral_x = max(-0.05, min(0.05, velocity_integral_x))
velocity_integral_y = max(-0.05, min(0.05, velocity_integral_y))
velocity_i_x = velocity_integral_x * VELOCITY_KI
velocity_i_y = velocity_integral_y * VELOCITY_KI
# Derivative
velocity_derivative_x = (
velocity_error_x - last_velocity_error_x
) / CONTROL_UPDATE_RATE
velocity_derivative_y = (
velocity_error_y - last_velocity_error_y
) / CONTROL_UPDATE_RATE
velocity_d_x = velocity_derivative_x * VELOCITY_KD
velocity_d_y = velocity_derivative_y * VELOCITY_KD
# Store current errors for next iteration
last_velocity_error_x = velocity_error_x
last_velocity_error_y = velocity_error_y
# Combine PID outputs
position_correction_vx = position_p_x + position_i_x + position_d_x
position_correction_vy = position_p_y + position_i_y + position_d_y
velocity_correction_vx = velocity_p_x + velocity_i_x + velocity_d_x
velocity_correction_vy = velocity_p_y + velocity_i_y + velocity_d_y
# Combine position and velocity corrections
total_vx = position_correction_vx + velocity_correction_vx
total_vy = position_correction_vy + velocity_correction_vy
# Apply approach damping when close to target to reduce overshoot
distance_to_target = (
(integrated_position_x - target_x) ** 2
+ (integrated_position_y - target_y) ** 2
) ** 0.5
if distance_to_target < 0.1: # Simple 10cm damping zone
velocity_magnitude = (current_vx**2 + current_vy**2) ** 0.5
if velocity_magnitude > 0.05:
total_vx *= 0.8
total_vy *= 0.8
# Apply limits
total_vx = max(-MAX_CORRECTION, min(MAX_CORRECTION, total_vx))
total_vy = max(-MAX_CORRECTION, min(MAX_CORRECTION, total_vy))
# Store for GUI display
current_correction_vx = total_vx
current_correction_vy = total_vy
return total_vx, total_vy
def update_history():
"""Update data history for plotting (Thread-Safe)"""
global start_time
if start_time is None:
start_time = time.time()
current_time = time.time() - start_time
with data_lock:
# Add new data points (deques handle trimming automatically)
time_history.append(current_time)
velocity_x_history_plot.append(current_vx)
velocity_y_history_plot.append(current_vy)
position_x_history.append(integrated_position_x)
position_y_history.append(integrated_position_y)
correction_vx_history.append(current_correction_vx)
correction_vy_history.append(current_correction_vy)
height_history.append(current_height)
range_height_history.append(current_range_height)
# Add to complete trajectory
complete_trajectory_x.append(integrated_position_x)
complete_trajectory_y.append(integrated_position_y)
def motion_callback(timestamp, data, logconf):
"""Motion sensor data callback"""
global current_height, current_range_height, motion_delta_x, motion_delta_y, sensor_data_ready
global current_vx, current_vy, last_integration_time, last_sensor_heartbeat
global debug_counter
# Update heartbeat immediately
last_sensor_heartbeat = time.time()
# Get sensor data
current_height = data.get("stateEstimate.z", 0)
# Get raw range and convert to meters (mm -> m)
raw_range_mm = data.get("range.zrange", 0)
current_range_height = raw_range_mm / 1000.0 if raw_range_mm else 0.0
motion_delta_x = data.get("motion.deltaX", 0)
motion_delta_y = data.get("motion.deltaY", 0)
sensor_data_ready = True
# Calculate velocities
raw_velocity_x = calculate_velocity(motion_delta_x, current_height)
raw_velocity_y = calculate_velocity(motion_delta_y, current_height)
# Debug output every 100 callbacks (reduce console spam)
# debug_counter += 1
# if debug_counter % 100 == 0 and (
# abs(motion_delta_x) > 0 or abs(motion_delta_y) > 0
# ):
# print(
# f"Sensor Debug - Height: {current_height:.3f}m, "
# f"Raw Motion: X={motion_delta_x}, Y={motion_delta_y}, "
# f"Velocities: X={raw_velocity_x:.4f}, Y={raw_velocity_y:.4f}"
# )
# Apply smoothing
current_vx = smooth_velocity(raw_velocity_x, velocity_x_history)
current_vy = smooth_velocity(raw_velocity_y, velocity_y_history)
# Dead reckoning position integration (only when enabled)
current_time = time.time()
dt = current_time - last_integration_time
if 0.001 <= dt <= 0.1 and position_integration_enabled:
integrate_position(current_vx, current_vy, dt)
last_integration_time = current_time
# Update history for GUI
update_history()
def battery_callback(timestamp, data, logconf):
"""Battery voltage data callback"""
global current_battery_voltage, battery_data_ready
# Get battery voltage
current_battery_voltage = data.get("pm.vbat", 0.0)
battery_data_ready = True
def setup_logging(cf, logger=None):
"""Setup motion sensor and battery voltage logging"""
log_motion = LogConfig(name="Motion", period_in_ms=SENSOR_PERIOD_MS)
log_battery = LogConfig(
name="Battery", period_in_ms=500
) # Check battery every 500ms
try:
toc = cf.log.toc.toc
# Setup motion logging
motion_variables = [
("motion.deltaX", "int16_t"),
("motion.deltaY", "int16_t"),
("stateEstimate.z", "float"),
("range.zrange", "uint16_t"),
]
added_motion_vars = []
for var_name, var_type in motion_variables:
group, name = var_name.split(".")
if group in toc and name in toc[group]:
try:
log_motion.add_variable(var_name, var_type)
added_motion_vars.append(var_name)
except Exception as e:
if logger:
logger(f"Failed to add motion variable {var_name}: {e}")
else:
# Use global logger to redirect to output window
log_message(f"Failed to add motion variable {var_name}: {e}")
else:
if logger:
logger(f"Motion variable not found: {var_name}")
else:
# Use global logger to redirect to output window
log_message(f"Motion variable not found: {var_name}")
if len(added_motion_vars) < 2:
if logger:
logger("ERROR: Not enough motion variables found!")
else:
# Use global logger to redirect to output window
log_message("ERROR: Not enough motion variables found!")
return None, None
# Setup battery logging
battery_variables = [("pm.vbat", "float")]
added_battery_vars = []
for var_name, var_type in battery_variables:
group, name = var_name.split(".")
if group in toc and name in toc[group]:
try:
log_battery.add_variable(var_name, var_type)
added_battery_vars.append(var_name)
if logger:
logger(f"Added battery variable: {var_name}")
else:
# Use global logger to redirect to output window
log_message(f"Added battery variable: {var_name}")
except Exception as e:
if logger:
logger(f"Failed to add battery variable {var_name}: {e}")
else:
# Use global logger to redirect to output window
log_message(f"Failed to add battery variable {var_name}: {e}")
else:
if logger:
logger(f"Battery variable not found: {var_name}")
else:
# Use global logger to redirect to output window
log_message(f"Battery variable not found: {var_name}")
# Setup callbacks
log_motion.data_received_cb.add_callback(motion_callback)
if len(added_battery_vars) > 0:
log_battery.data_received_cb.add_callback(battery_callback)
# Add configurations
cf.log.add_config(log_motion)
if len(added_battery_vars) > 0:
cf.log.add_config(log_battery)
time.sleep(0.5)
# Validate configurations
if not log_motion.valid:
if logger:
logger("ERROR: Motion log configuration invalid!")
else:
# Use global logger to redirect to output window
log_message("ERROR: Motion log configuration invalid!")
return None, None
if len(added_battery_vars) > 0 and not log_battery.valid:
if logger:
logger("WARNING: Battery log configuration invalid!")
else:
# Use global logger to redirect to output window
log_message("WARNING: Battery log configuration invalid!")
# Continue without battery logging
log_battery = None
# Start logging
log_motion.start()
if log_battery:
log_battery.start()
time.sleep(0.5)
if logger:
logger(
f"Logging started - Motion: {len(added_motion_vars)} vars, Battery: {len(added_battery_vars)} vars"
)
else:
# Use global logger to redirect to output window
log_message(
f"Logging started - Motion: {len(added_motion_vars)} vars, Battery: {len(added_battery_vars)} vars"
)
return log_motion, log_battery
except Exception as e:
error_msg = f"Logging setup failed: {str(e)}"
if logger:
logger(error_msg)
else:
# Use global logger to redirect to output window
log_message(error_msg)
raise Exception(error_msg)
def init_csv_logging(logger=None):
"""Initialize CSV logging for position and height"""
global log_file, log_writer
if not DRONE_CSV_LOGGING:
return
timestamp = datetime.now().strftime("%Y%m%d_%H%M%S")
log_filename = f"drone_flight_log_{timestamp}.csv"
log_file = open(log_filename, mode="w", newline="")
log_writer = csv.writer(log_file)
# Write header
log_writer.writerow(
[
"Timestamp (s)",
"Integrated Position X (m)",
"Integrated Position Y (m)",
"Height (m)",
"Range (m)",
"Velocity X (m/s)",
"Velocity Y (m/s)",
"Correction VX",
"Correction VY",
]
)
if logger:
logger(f"Logging to CSV: {log_filename}")
else:
# Use global logger to redirect to output window
log_message(f"Logging to CSV: {log_filename}")
def log_to_csv():
"""Log current state to CSV if logging is active"""
global log_writer, start_time
if not DRONE_CSV_LOGGING or log_writer is None or start_time is None:
return
elapsed = time.time() - start_time
log_writer.writerow(
[
f"{elapsed:.3f}",
f"{integrated_position_x:.6f}",
f"{integrated_position_y:.6f}",
f"{current_height:.6f}",
f"{current_range_height:.6f}",
f"{current_vx:.6f}",
f"{current_vy:.6f}",
f"{current_correction_vx:.6f}",
f"{current_correction_vy:.6f}",
]
)
def close_csv_logging(logger=None):
"""Close CSV log file"""
global log_file
if log_file:
log_file.close()
log_file = None
if logger:
logger("CSV log closed.")
else:
# Use global logger to redirect to output window
log_message("CSV log closed.")
class DeadReckoningGUI:
def __init__(self, root):
self.root = root
self.root.title(
"Dead Reckoning Position Hold with Maneuvers - Real-Time Monitor"
)
self.root.geometry("1400x950") # Increased height to accommodate new controls
# Flight control variables
self.flight_thread = None
self.flight_running = False
self.sensor_test_thread = None # New thread variable for sensor test
self.sensor_test_running = False # New flag for sensor test running state
self.joystick_thread = None # Thread for joystick control
self.joystick_active = False # Flag for joystick control active
self.joystick_keys = {
"w": False,
"a": False,
"s": False,
"d": False,
} # Joystick key states
# Output window visibility control
self.show_output_window = True # Boolean to enable/disable output window
# Joystick position hold mode
self.joystick_hold_at_origin = (
False # False = hold at current position, True = return to origin
)
# Track which keys are currently pressed to prevent duplicate logging
self.key_pressed_flags = {
"w": False,
"a": False,
"s": False,
"d": False,
}
self._joystick_debug_counter = 0 # Counter for throttling debug logs
self.create_ui()
self.setup_plots()
# Set up global logging to redirect fallback messages to the output window
set_global_logger(self.log_to_output)
# NeoPixel state (lazy connect). We store a Crazyflie instance here
# and a flag indicating whether this GUI owns the link (so we can
# close it when appropriate). Reuse global SyncCrazyflie when present.
self.neo_cf = None
self._neo_owns_link = False
self.blinking = False
self.low_battery_blinking = False # Flag for low battery blink
# Persistent last color for NeoPixels. This is used so blinking and
# static color are independent and stopping blink does not lose the
# previously-set color. Initialize from the UI defaults.
try:
r = int(self.rgb_r_var.get())
g = int(self.rgb_g_var.get())
b = int(self.rgb_b_var.get())
except Exception:
r, g, b = 255, 255, 255
self.neo_last_color = (r, g, b)
# Start animation
self.anim = animation.FuncAnimation(
self.fig, self.update_plots, interval=100, cache_frame_data=False
)
# Bind keyboard events for joystick control
self.root.bind("<KeyPress>", self.on_key_press)
self.root.bind("<KeyRelease>", self.on_key_release)
self.root.focus_set() # Ensure root window has focus for key events
def create_ui(self):
"""Create the user interface"""
# Control panel
control_frame = tk.Frame(self.root)
control_frame.pack(fill=tk.X, padx=10, pady=5)
# Load and display logo in top right
try:
script_dir = os.path.dirname(os.path.abspath(__file__))
logo_path = os.path.join(script_dir, "litewing_logo.png")
if os.path.exists(logo_path):
pil_img = Image.open(logo_path)
# Resize logo to a reasonable size (e.g., height of 40px)
aspect_ratio = pil_img.width / pil_img.height
new_height = 60
new_width = int(new_height * aspect_ratio)
pil_img = pil_img.resize((new_width, new_height), Image.Resampling.LANCZOS)
self.logo_img = ImageTk.PhotoImage(pil_img)
self.logo_label = tk.Label(control_frame, image=self.logo_img)
self.logo_label.pack(side=tk.RIGHT, padx=10)
except Exception as e:
print(f"Error loading logo: {e}")
# Flight control buttons
self.start_button = tk.Button(
control_frame,
text="Start Flight",
command=self.start_flight,
bg="green",
fg="white",
font=("Arial", 12),
)
self.start_button.pack(side=tk.LEFT, padx=10)
# Sensor Test button - starts a separate sensor test thread (non-flight)
self.sensor_test_button = tk.Button(
control_frame,
text="Sensor Test",
command=self.start_sensor_test,
bg="lightblue",
fg="black",
font=("Arial", 12),
)
self.sensor_test_button.pack(side=tk.LEFT, padx=10)
# Reset Battery button - resets battery voltage reading
self.reset_battery_button = tk.Button(
control_frame,
text="Reset Battery",
command=self.reset_battery,
bg="orange",
fg="black",
font=("Arial", 11),
)
self.reset_battery_button.pack(side=tk.LEFT, padx=5)
# Create a frame for the checkboxes to stack them vertically
checkboxes_frame = tk.Frame(control_frame)
checkboxes_frame.pack(side=tk.LEFT, padx=(10, 0))
# Enable logging checkbox for sensor test
self.enable_sensor_logging_var = tk.BooleanVar(value=False)
self.enable_sensor_logging_check = tk.Checkbutton(
checkboxes_frame,
text="Log Sensor Test",
variable=self.enable_sensor_logging_var,
)
self.enable_sensor_logging_check.pack(side=tk.TOP, anchor=tk.W)
# Enable debug mode checkbox (stacked below sensor test in same column)
self.enable_debug_mode_var = tk.BooleanVar(value=DEBUG_MODE)
self.enable_debug_mode_check = tk.Checkbutton(
checkboxes_frame,
text="Enable Debug Mode",
variable=self.enable_debug_mode_var,
command=self.toggle_debug_mode,
)
self.enable_debug_mode_check.pack(side=tk.TOP, anchor=tk.W)
# Primary CSV logging toggle
self.enable_csv_logging_var = tk.BooleanVar(value=DRONE_CSV_LOGGING)
self.enable_csv_logging_check = tk.Checkbutton(
checkboxes_frame,
text="Enable CSV Logging",
variable=self.enable_csv_logging_var,
command=self.toggle_csv_logging,
)
self.enable_csv_logging_check.pack(side=tk.TOP, anchor=tk.W)
# Blink NeoPixel button - New button
self.blink_button = tk.Button(
control_frame,
text="Blink LEDs",
command=self.toggle_blink,
bg="yellow",
state=tk.DISABLED,
fg="black",
font=("Arial", 12),
)
self.blink_button.pack(side=tk.LEFT, padx=10)
self.clear_leds_button = tk.Button(
control_frame,
text="Clear LEDs",
command=self.clear_leds,
bg="lightgrey",
state=tk.DISABLED,
fg="black",
font=("Arial", 11),
)
self.clear_leds_button.pack(side=tk.LEFT, padx=6)
# RGB controls (R, G, B spinboxes) and Set Color button
rgb_frame = tk.Frame(control_frame)
rgb_frame.pack(side=tk.LEFT, padx=(6, 0))
tk.Label(rgb_frame, text="R:").pack(side=tk.LEFT)
self.rgb_r_var = tk.StringVar(value="255")
self.rgb_r_spin = tk.Spinbox(
rgb_frame, from_=0, to=255, width=4, textvariable=self.rgb_r_var
)
self.rgb_r_spin.pack(side=tk.LEFT)
tk.Label(rgb_frame, text="G:").pack(side=tk.LEFT, padx=(6, 0))
self.rgb_g_var = tk.StringVar(value="255")
self.rgb_g_spin = tk.Spinbox(
rgb_frame, from_=0, to=255, width=4, textvariable=self.rgb_g_var
)
self.rgb_g_spin.pack(side=tk.LEFT)
tk.Label(rgb_frame, text="B:").pack(side=tk.LEFT, padx=(6, 0))
self.rgb_b_var = tk.StringVar(value="255")
self.rgb_b_spin = tk.Spinbox(
rgb_frame, from_=0, to=255, width=4, textvariable=self.rgb_b_var
)
self.rgb_b_spin.pack(side=tk.LEFT)
self.set_color_button = tk.Button(
control_frame,
text="Set Color",
command=self.set_color_from_ui,
bg="lightgrey",
state=tk.DISABLED,
fg="black",
font=("Arial", 11),
)
self.set_color_button.pack(side=tk.LEFT, padx=6)
# Flight status
self.status_var = tk.StringVar(value="Status: Ready")
self.status_label = tk.Label(
control_frame,
textvariable=self.status_var,
font=("Arial", 12, "bold"),
fg="blue",
)
self.status_label.pack(side=tk.LEFT, padx=20)
# Main frame for layout
main_frame = tk.Frame(self.root)
main_frame.pack(fill=tk.BOTH, expand=True, padx=10, pady=5)
# Left side - Parameters
left_frame = tk.Frame(main_frame)
left_frame.pack(side=tk.LEFT, fill=tk.Y, padx=(0, 5))
# Flight Control Parameters
runtime_frame = tk.LabelFrame(
left_frame, text="Flight Control Parameters", padx=10, pady=10
)
runtime_frame.pack(fill=tk.X, pady=5)
# Create runtime controls
self.create_runtime_controls(runtime_frame)
# Maneuver Controls
maneuver_frame = tk.LabelFrame(left_frame, text="Controls", padx=10, pady=10)
maneuver_frame.pack(fill=tk.X, pady=5)
# Create maneuver controls
self.create_maneuver_controls(maneuver_frame)
# PID Tuning Controls
pid_frame = tk.LabelFrame(
left_frame, text="PID Tuning Controls", padx=10, pady=10
)
pid_frame.pack(fill=tk.X, pady=5)
# Create PID tuning controls
self.create_pid_controls(pid_frame)
# Right side - Values and Plots
right_frame = tk.Frame(main_frame)
right_frame.pack(side=tk.RIGHT, fill=tk.BOTH, expand=True, padx=(5, 0))
# Real-time values display (Top of right side)
values_frame = tk.LabelFrame(
right_frame, text="Real-Time Values", padx=10, pady=10
)
values_frame.pack(fill=tk.X, pady=5)
# Create value displays in a grid
self.create_value_displays(values_frame)
# Matplotlib figure (Bottom of right side, expanded)
self.fig = Figure(figsize=(12, 10))
self.canvas = FigureCanvasTkAgg(self.fig, master=right_frame)
self.canvas.get_tk_widget().pack(fill=tk.BOTH, expand=True)
def create_maneuver_controls(self, parent):
"""Create maneuver control buttons in compact layout"""
# Main container frame for both maneuver and joystick controls
main_controls_frame = tk.Frame(parent)
main_controls_frame.pack(fill=tk.X, pady=5)
# Left side - Maneuver Controls (more compact)
maneuver_frame = tk.LabelFrame(
main_controls_frame, text="Maneuver Controls", padx=5, pady=5
)
maneuver_frame.pack(side=tk.LEFT, fill=tk.BOTH, expand=True, padx=(0, 3))
# Maneuver distance control (compact)
distance_frame = tk.Frame(maneuver_frame)
distance_frame.pack(fill=tk.X, pady=2)
tk.Label(distance_frame, text="Distance (m):", width=12).pack(side=tk.LEFT)
self.maneuver_distance_var = tk.StringVar(value=str(MANEUVER_DISTANCE))
self.maneuver_distance_entry = tk.Entry(
distance_frame, textvariable=self.maneuver_distance_var, width=6
)
self.maneuver_distance_entry.pack(side=tk.LEFT, padx=2)
# Joystick layout frame (compact 3x3 grid)
joystick_frame = tk.Frame(maneuver_frame)
joystick_frame.pack(pady=5)
# Create a 3x3 grid for joystick layout
for i in range(3):
joystick_frame.grid_rowconfigure(i, weight=1)
joystick_frame.grid_columnconfigure(i, weight=1)
# Forward button (top center) - smaller
self.forward_button = tk.Button(
joystick_frame,
text="↑\nForward",
command=self.maneuver_forward,
bg="blue",
fg="white",
font=("Arial", 9),
width=6,
height=2,
)
self.forward_button.grid(row=0, column=1, padx=2, pady=2)
# Left button (middle left) - smaller
self.left_button = tk.Button(
joystick_frame,
text="→\nRight",
command=self.maneuver_right,
bg="blue",
fg="white",
font=("Arial", 9),
width=6,
height=2,
)
self.left_button.grid(row=1, column=2, padx=2, pady=2)
# Stop button (center) - smaller
self.stop_button = tk.Button(
joystick_frame,
text="STOP",
command=self.stop_maneuver,
bg="red",
fg="white",
font=("Arial", 10, "bold"),
width=6,
height=2,
)
self.stop_button.grid(row=1, column=1, padx=2, pady=2)
# Right button (middle right) - smaller
self.right_button = tk.Button(
joystick_frame,
text="←\nLeft",
command=self.maneuver_left,
bg="blue",
fg="white",
font=("Arial", 9),
width=6,
height=2,
)
self.right_button.grid(row=1, column=0, padx=2, pady=2)
# Backward button (bottom center) - smaller
self.backward_button = tk.Button(
joystick_frame,
text="↓\nBackward",
command=self.maneuver_backward,
bg="blue",
fg="white",
font=("Arial", 9),
width=6,
height=2,
)
self.backward_button.grid(row=2, column=1, padx=2, pady=2)
# Shape maneuver buttons (compact horizontal layout)
shape_frame = tk.Frame(maneuver_frame)
shape_frame.pack(pady=3)
tk.Label(shape_frame, text="Shapes:").pack(side=tk.LEFT, padx=(0, 3))
self.square_button = tk.Button(
shape_frame,
text="Square",
command=self.maneuver_square,
bg="purple",
fg="white",
font=("Arial", 9),
width=6,
)
self.square_button.pack(side=tk.LEFT, padx=1)
# Hop-style landing controls removed for simplification
# Right side - Joystick Controls (more compact)
joystick_control_frame = tk.LabelFrame(
main_controls_frame, text="Joystick Control", padx=5, pady=5
)
joystick_control_frame.pack(
side=tk.RIGHT, fill=tk.BOTH, expand=True, padx=(3, 0)
)
# Joystick sensitivity control (compact)
sensitivity_frame = tk.Frame(joystick_control_frame)
sensitivity_frame.pack(fill=tk.X, pady=2)
tk.Label(sensitivity_frame, text="Sensitivity:", width=10).pack(side=tk.LEFT)
self.joystick_sensitivity_var = tk.StringVar(value=str(JOYSTICK_SENSITIVITY))
self.joystick_sensitivity_entry = tk.Entry(
sensitivity_frame, textvariable=self.joystick_sensitivity_var, width=5
)
self.joystick_sensitivity_entry.pack(side=tk.LEFT, padx=2)
tk.Label(
sensitivity_frame, text="(0.1-2.0)", font=("Arial", 7), fg="gray"
).pack(side=tk.LEFT)
# Joystick button layout frame (compact 3x3 grid)
joystick_buttons_frame = tk.Frame(joystick_control_frame)
joystick_buttons_frame.pack(pady=5)
# Create a 3x3 grid for joystick layout
for i in range(3):
joystick_buttons_frame.grid_rowconfigure(i, weight=1)
joystick_buttons_frame.grid_columnconfigure(i, weight=1)
# Forward button (top center) - smaller
self.joystick_forward_button = tk.Button(
joystick_buttons_frame,
text="↑\nW",
bg="green",
fg="white",
font=("Arial", 9),
width=5,
height=2,
)
self.joystick_forward_button.grid(row=0, column=1, padx=2, pady=2)
self.joystick_forward_button.bind(
"<ButtonPress>", lambda e: self.start_continuous_movement("w")
)
self.joystick_forward_button.bind(
"<ButtonRelease>", lambda e: self.stop_continuous_movement("w")
)
# Left button (middle left) - smaller
self.joystick_left_button = tk.Button(
joystick_buttons_frame,
text="←\nA",
bg="green",
fg="white",
font=("Arial", 9),
width=5,
height=2,
)
self.joystick_left_button.grid(row=1, column=0, padx=2, pady=2)
self.joystick_left_button.bind(
"<ButtonPress>", lambda e: self.start_continuous_movement("a")
)
self.joystick_left_button.bind(
"<ButtonRelease>", lambda e: self.stop_continuous_movement("a")
)
# Stop button (center) - smaller
self.joystick_stop_button = tk.Button(
joystick_buttons_frame,
text="STOP",
command=self.stop_joystick_control,
bg="red",
fg="white",
font=("Arial", 10, "bold"),
width=5,
height=2,
)
self.joystick_stop_button.grid(row=1, column=1, padx=2, pady=2)
# Right button (middle right) - smaller
self.joystick_right_button = tk.Button(
joystick_buttons_frame,
text="→\nD",
bg="green",
fg="white",
font=("Arial", 9),
width=5,
height=2,
)
self.joystick_right_button.grid(row=1, column=2, padx=2, pady=2)
self.joystick_right_button.bind(
"<ButtonPress>", lambda e: self.start_continuous_movement("d")
)
self.joystick_right_button.bind(
"<ButtonRelease>", lambda e: self.stop_continuous_movement("d")
)
# Backward button (bottom center) - smaller
self.joystick_backward_button = tk.Button(
joystick_buttons_frame,
text="↓\nS",
bg="green",
fg="white",
font=("Arial", 9),
width=5,
height=2,
)
self.joystick_backward_button.grid(row=2, column=1, padx=2, pady=2)
self.joystick_backward_button.bind(
"<ButtonPress>", lambda e: self.start_continuous_movement("s")
)
self.joystick_backward_button.bind(
"<ButtonRelease>", lambda e: self.stop_continuous_movement("s")
)
# Joystick control buttons (centered start button only)
control_buttons_frame = tk.Frame(joystick_control_frame)
control_buttons_frame.pack(fill=tk.X, pady=3)
self.start_joystick_button = tk.Button(
control_buttons_frame,
text="Start Joystick",
command=self.start_joystick_control,
bg="green",
fg="white",
font=("Arial", 9, "bold"),
width=15,
)
self.start_joystick_button.pack(expand=True)
# Joystick position hold mode checkbox
position_hold_frame = tk.Frame(joystick_control_frame)
position_hold_frame.pack(fill=tk.X, pady=3)
self.joystick_hold_origin_var = tk.BooleanVar(
value=self.joystick_hold_at_origin
)
self.joystick_hold_origin_check = tk.Checkbutton(
position_hold_frame,
text="Hold at Origin (uncheck to hold at current position)",
variable=self.joystick_hold_origin_var,
command=self.toggle_joystick_hold_mode,
font=("Arial", 8),
)
self.joystick_hold_origin_check.pack()
# Joystick status display (compact)
self.joystick_status_var = tk.StringVar(value="Joystick: INACTIVE")
tk.Label(
joystick_control_frame,
textvariable=self.joystick_status_var,
font=("Arial", 9, "bold"),
fg="blue",
).pack(pady=2)
def maneuver_forward(self):
"""Execute forward maneuver"""
try:
distance = float(self.maneuver_distance_var.get())
# For directional buttons, we want exactly 'distance' from 'here'
# Reset position but keep learned auto-trim (integrals)
reset_position_tracking(reset_integrals=False)
new_target_x = 0.0
new_target_y = distance
self.start_maneuver(new_target_x, new_target_y)
self.log_to_output(f"Maneuver: Forward {distance:.2f}m")
except ValueError:
self.status_var.set("Status: Invalid maneuver distance")
def maneuver_backward(self):
"""Execute backward maneuver"""
try:
distance = float(self.maneuver_distance_var.get())
# Reset position but keep learned auto-trim (integrals)
reset_position_tracking(reset_integrals=False)
new_target_x = 0.0
new_target_y = -distance
self.start_maneuver(new_target_x, new_target_y)
self.log_to_output(f"Maneuver: Backward {distance:.2f}m")
except ValueError:
self.status_var.set("Status: Invalid maneuver distance")
def maneuver_left(self):
"""Execute left maneuver"""
try:
distance = float(self.maneuver_distance_var.get())
# Reset position but keep learned auto-trim (integrals)
reset_position_tracking(reset_integrals=False)
new_target_x = distance
new_target_y = 0.0
self.start_maneuver(new_target_x, new_target_y)
self.log_to_output(f"Maneuver: Left {distance:.2f}m")
except ValueError:
self.status_var.set("Status: Invalid maneuver distance")
def maneuver_right(self):
"""Execute right maneuver"""
try:
distance = float(self.maneuver_distance_var.get())
# Reset position but keep learned auto-trim (integrals)
reset_position_tracking(reset_integrals=False)
new_target_x = -distance
new_target_y = 0.0
self.start_maneuver(new_target_x, new_target_y)
self.log_to_output(f"Maneuver: Right {distance:.2f}m")
except ValueError:
self.status_var.set("Status: Invalid maneuver distance")
def stop_maneuver(self):
"""Stop the current maneuver and flight"""
global maneuver_active, target_position_x, target_position_y, flight_active
maneuver_active = False
flight_active = False
target_position_x = integrated_position_x
target_position_y = integrated_position_y
self.log_to_output("Maneuver and flight stopped")
self.log_to_output("Maneuver stopped")
def maneuver_square(self):
"""Execute square maneuver"""
try:
distance = float(self.maneuver_distance_var.get())
# 1. Reset origin to "Here" first, but keep the learned auto-trim (integrals)
reset_position_tracking(reset_integrals=False)
# 2. Calculate waypoints for square pattern (Right -> Forward -> Left -> Home)
# +X=Left, -X=Right, +Y=Forward, -Y=Backward
waypoints = [
(-distance, 0.0), # Stage 1: Move Right
(-distance, distance), # Stage 2: Move Forward
(0.0, distance), # Stage 3: Move Left
(0.0, 0.0) # Stage 4: Back Home
]
self.start_shape_maneuver(waypoints)
self.log_to_output(f"Maneuver: Square {distance:.2f}m initiated")
except ValueError:
self.status_var.set("Status: Invalid maneuver distance")
def calculate_square_waypoints(self, distance):
"""Calculate waypoints for square pattern (deprecated - logic moved to maneuver_square)"""
return []
def start_shape_maneuver(self, waypoints):
"""Start a shape maneuver with waypoints or update current flight"""
global shape_waypoints, shape_index, shape_active, maneuver_active, target_position_x, target_position_y, waypoint_start_time
# If already flying, just update the waypoints and activate shape
if self.flight_running:
shape_waypoints = waypoints
shape_index = 0
shape_active = True
maneuver_active = True
target_position_x, target_position_y = shape_waypoints[0]
waypoint_start_time = time.time()
self.log_to_output(f"Shape maneuver updated mid-flight: {len(waypoints)} waypoints")
return
if not self.flight_running and not self.sensor_test_running:
# Battery safety check
if (
current_battery_voltage > 0
and current_battery_voltage < LOW_BATTERY_THRESHOLD
):
self.status_var.set(
f"Status: Battery too low ({current_battery_voltage:.2f}V)! Cannot start maneuver."
)
return
elif current_battery_voltage == 0.0:
print("WARNING: Battery voltage unknown")
# SENSOR SAFETY CHECK
if not sensor_data_ready:
self.status_var.set(
"Status: Sensor data not ready! Wait for height & motion readings."
)
return
if current_height <= 0.0:
self.status_var.set(
"Status: Invalid height reading! Ensure drone is powered and sensors active."
)
return
# Set shape maneuver parameters
shape_waypoints = waypoints
shape_index = 0
shape_active = True
maneuver_active = True
target_position_x, target_position_y = shape_waypoints[0]
waypoint_start_time = time.time() # Initialize timeout tracking
# Proceed
self.flight_running = True
self.start_button.config(
text="Stop Flight", command=self.emergency_stop, bg="red"
)
self.status_var.set(
f"Status: Starting Shape Maneuver ({len(waypoints)} points) - Stabilizing height first..."
)
self.flight_thread = threading.Thread(target=self.flight_controller_thread)
self.flight_thread.daemon = True
self.flight_thread.start()
# Log to output window
self.log_to_output(f"Shape maneuver started: {len(waypoints)} waypoints")
elif self.sensor_test_running:
self.log_to_output(
"Cannot start Shape Maneuver while Sensor Test is active."
)
self.status_var.set(
"Status: Sensor Test Active - Cannot Start Shape Maneuver"
)
def start_maneuver(self, delta_x, delta_y):
"""Start a maneuver flight or update current flight"""
global maneuver_active, target_position_x, target_position_y, waypoint_start_time
# If already flying, just update the target and activate maneuver
if self.flight_running:
maneuver_active = True
target_position_x = delta_x
target_position_y = delta_y
waypoint_start_time = time.time()
self.log_to_output(f"Maneuver updated mid-flight: ({delta_x:.2f}, {delta_y:.2f})")
return
if not self.flight_running and not self.sensor_test_running:
# Battery safety check
if (
current_battery_voltage > 0
and current_battery_voltage < LOW_BATTERY_THRESHOLD
):
self.status_var.set(
f"Status: Battery too low ({current_battery_voltage:.2f}V)! Cannot start maneuver."
)
return
elif current_battery_voltage == 0.0:
print("WARNING: Battery voltage unknown")
# SENSOR SAFETY CHECK
if not sensor_data_ready:
self.status_var.set(
"Status: Sensor data not ready! Wait for height & motion readings."
)
return
if current_height <= 0.0:
self.status_var.set(
"Status: Invalid height reading! Ensure drone is powered and sensors active."
)
return
# Set maneuver parameters
maneuver_active = True
target_position_x = delta_x
target_position_y = delta_y
waypoint_start_time = time.time() # Reset timer for single maneuver
# Proceed
self.flight_running = True
self.start_button.config(
text="Stop Flight", command=self.emergency_stop, bg="red"
)
self.status_var.set(
f"Status: Starting Maneuver ({delta_x:.2f}, {delta_y:.2f}) - Stabilizing height first..."
)
self.flight_thread = threading.Thread(target=self.flight_controller_thread)
self.flight_thread.daemon = True
self.flight_thread.start()
# Log to output window
self.log_to_output(f"Maneuver started: ({delta_x:.2f}, {delta_y:.2f})")
elif self.sensor_test_running:
self.log_to_output("Cannot start Maneuver while Sensor Test is active.")
self.status_var.set("Status: Sensor Test Active - Cannot Start Maneuver")
def create_value_displays(self, parent):
"""Create real-time value display widgets"""
# Main container with left and right columns
main_container = tk.Frame(parent)
main_container.pack(fill=tk.BOTH, expand=True)
# Left column - Value displays
left_column = tk.Frame(main_container)
left_column.pack(side=tk.LEFT, fill=tk.Y, expand=True)
# Row 1: Basic values
row1 = tk.Frame(left_column)
row1.pack(fill=tk.X, pady=2)
self.height_var = tk.StringVar(value="Height: 0.000m")
self.phase_var = tk.StringVar(value="Phase: IDLE")
self.battery_var = tk.StringVar(value="Battery: 0.00V")
tk.Label(
row1, textvariable=self.height_var, font=("Arial", 11, "bold"), fg="blue"
).pack(side=tk.LEFT, padx=10)
self.range_var = tk.StringVar(value="Range: 0.000m")
tk.Label(
row1, textvariable=self.range_var, font=("Arial", 11, "bold"), fg="cyan4"
).pack(side=tk.LEFT, padx=10)
tk.Label(
row1, textvariable=self.phase_var, font=("Arial", 11, "bold"), fg="red"
).pack(side=tk.LEFT, padx=10)
tk.Label(
row1, textvariable=self.battery_var, font=("Arial", 11, "bold"), fg="orange"
).pack(side=tk.LEFT, padx=20)
# Row 2: Velocities
row2 = tk.Frame(left_column)
row2.pack(fill=tk.X, pady=2)
self.vx_var = tk.StringVar(value="VX: 0.000 m/s")
self.vy_var = tk.StringVar(value="VY: 0.000 m/s")
tk.Label(row2, textvariable=self.vx_var, font=("Arial", 11)).pack(
side=tk.LEFT, padx=20
)
tk.Label(row2, textvariable=self.vy_var, font=("Arial", 11)).pack(
side=tk.LEFT, padx=20
)
# Row 3: Integrated positions
row3 = tk.Frame(left_column)
row3.pack(fill=tk.X, pady=2)
self.pos_x_var = tk.StringVar(value="Position X: 0.000m")
self.pos_y_var = tk.StringVar(value="Position Y: 0.000m")
tk.Label(
row3,
textvariable=self.pos_x_var,
font=("Arial", 11, "bold"),
fg="darkgreen",
).pack(side=tk.LEFT, padx=20)
tk.Label(
row3,
textvariable=self.pos_y_var,
font=("Arial", 11, "bold"),
fg="darkgreen",
).pack(side=tk.LEFT, padx=20)
# Row 4: Control corrections
row4 = tk.Frame(left_column)
row4.pack(fill=tk.X, pady=2)
self.corr_vx_var = tk.StringVar(value="Correction VX: 0.000")
self.corr_vy_var = tk.StringVar(value="Correction VY: 0.000")
tk.Label(
row4, textvariable=self.corr_vx_var, font=("Arial", 11), fg="red"
).pack(side=tk.LEFT, padx=20)
tk.Label(
row4, textvariable=self.corr_vy_var, font=("Arial", 11), fg="red"
).pack(side=tk.LEFT, padx=20)
# Control buttons row
button_row = tk.Frame(left_column)
button_row.pack(fill=tk.X, pady=10)
self.apply_all_button = tk.Button(
button_row,
text="Apply All Values",
command=self.apply_all_values,
bg="green",
fg="black",
font=("Arial", 10, "bold"),
)
self.apply_all_button.pack(side=tk.LEFT, padx=5)
self.reset_all_button = tk.Button(
button_row,
text="Reset to Default",
command=self.reset_all_values,
bg="orange",
fg="black",
font=("Arial", 10),
)
self.reset_all_button.pack(side=tk.LEFT, padx=5)
self.clear_graphs_button = tk.Button(
button_row,
text="Clear Graphs",
command=self.clear_graphs,
bg="blue",
fg="black",
font=("Arial", 10),
)
self.clear_graphs_button.pack(side=tk.LEFT, padx=5)
# Right column - Output window (only if enabled)
if self.show_output_window:
right_column = tk.Frame(main_container)
right_column.pack(side=tk.RIGHT, fill=tk.BOTH, expand=True, padx=(10, 0))
# Output window label
output_label = tk.Label(
right_column, text="Output Log", font=("Arial", 10, "bold")
)
output_label.pack(anchor=tk.W, pady=(0, 5))
# Output text widget with scrollbar
output_frame = tk.Frame(right_column)
output_frame.pack(fill=tk.BOTH, expand=True)
self.output_text = tk.Text(
output_frame,
height=8,
width=40,
font=("Courier", 9),
bg="white",
fg="green",
wrap=tk.WORD,
)
output_scrollbar = tk.Scrollbar(
output_frame, command=self.output_text.yview
)
self.output_text.config(yscrollcommand=output_scrollbar.set)
self.output_text.pack(side=tk.LEFT, fill=tk.BOTH, expand=True)
output_scrollbar.pack(side=tk.RIGHT, fill=tk.Y)
# Output control buttons frame
output_buttons_frame = tk.Frame(right_column)
output_buttons_frame.pack(anchor=tk.W, pady=(5, 0))
# Clear output button
clear_output_button = tk.Button(
output_buttons_frame,
text="Clear Output",
command=self.clear_output,
bg="gray",
fg="black",
font=("Arial", 9),
)
clear_output_button.pack(side=tk.LEFT, padx=(0, 5))
# Save output log button
save_output_button = tk.Button(
output_buttons_frame,
text="Save",
command=self.save_output_log,
bg="blue",
fg="white",
font=("Arial", 9),
)
save_output_button.pack(side=tk.LEFT)
else:
# If output window is disabled, set output_text to None
self.output_text = None
# --- NEW FUNCTION: create_runtime_controls ---
def create_runtime_controls(self, parent):
"""Create runtime adjustable parameter controls"""
# Main frame for runtime controls
runtime_main_frame = tk.Frame(parent)
runtime_main_frame.pack(fill=tk.X, pady=2)
# Left column
left_col = tk.Frame(runtime_main_frame)
left_col.pack(side=tk.LEFT, fill=tk.Y, expand=True, padx=(0, 5))
# Right column
right_col = tk.Frame(runtime_main_frame)
right_col.pack(side=tk.RIGHT, fill=tk.Y, expand=True, padx=(5, 0))
# Left column parameters
# Target Height
target_height_frame = tk.Frame(left_col)
target_height_frame.pack(fill=tk.X, pady=2)
tk.Label(target_height_frame, text="Target Height (m):", width=18).pack(
side=tk.LEFT
)
self.target_height_var = tk.StringVar(value=str(TARGET_HEIGHT))
self.target_height_entry = tk.Entry(
target_height_frame, textvariable=self.target_height_var, width=8
)
self.target_height_entry.pack(side=tk.LEFT, padx=5)
# Takeoff Time
takeoff_time_frame = tk.Frame(left_col)
takeoff_time_frame.pack(fill=tk.X, pady=2)
tk.Label(takeoff_time_frame, text="Takeoff Time (s):", width=18).pack(
side=tk.LEFT
)
self.takeoff_time_var = tk.StringVar(value=str(TAKEOFF_TIME))
self.takeoff_time_entry = tk.Entry(
takeoff_time_frame, textvariable=self.takeoff_time_var, width=8
)
self.takeoff_time_entry.pack(side=tk.LEFT, padx=5)
# Hover Duration
hover_duration_frame = tk.Frame(left_col)
hover_duration_frame.pack(fill=tk.X, pady=2)
tk.Label(hover_duration_frame, text="Hover Duration (s):", width=18).pack(
side=tk.LEFT
)
self.hover_duration_var = tk.StringVar(value=str(HOVER_DURATION))
self.hover_duration_entry = tk.Entry(
hover_duration_frame, textvariable=self.hover_duration_var, width=8
)
self.hover_duration_entry.pack(side=tk.LEFT, padx=5)
# Landing Time
landing_time_frame = tk.Frame(left_col)
landing_time_frame.pack(fill=tk.X, pady=2)
tk.Label(landing_time_frame, text="Landing Time (s):", width=18).pack(
side=tk.LEFT
)
self.landing_time_var = tk.StringVar(value=str(LANDING_TIME))
self.landing_time_entry = tk.Entry(
landing_time_frame, textvariable=self.landing_time_var, width=8
)
self.landing_time_entry.pack(side=tk.LEFT, padx=5)
# Velocity Smoothing Alpha
vel_smooth_alpha_frame = tk.Frame(left_col)
vel_smooth_alpha_frame.pack(fill=tk.X, pady=2)
tk.Label(vel_smooth_alpha_frame, text="Velocity Smoothing α:", width=18).pack(
side=tk.LEFT
)
self.vel_smooth_alpha_var = tk.StringVar(value=str(VELOCITY_SMOOTHING_ALPHA))
self.vel_smooth_alpha_entry = tk.Entry(
vel_smooth_alpha_frame, textvariable=self.vel_smooth_alpha_var, width=8
)
self.vel_smooth_alpha_entry.pack(side=tk.LEFT, padx=5)
# Right column parameters
# Max Correction
max_corr_frame = tk.Frame(right_col)
max_corr_frame.pack(fill=tk.X, pady=2)
tk.Label(max_corr_frame, text="Max Correction:", width=18).pack(side=tk.LEFT)
self.max_corr_var = tk.StringVar(value=str(MAX_CORRECTION))
self.max_corr_entry = tk.Entry(
max_corr_frame, textvariable=self.max_corr_var, width=8
)
self.max_corr_entry.pack(side=tk.LEFT, padx=5)
# Velocity Threshold
vel_thresh_frame = tk.Frame(right_col)
vel_thresh_frame.pack(fill=tk.X, pady=2)
tk.Label(vel_thresh_frame, text="Velocity Threshold (m/s):", width=18).pack(
side=tk.LEFT
)
self.vel_thresh_var = tk.StringVar(value=str(VELOCITY_THRESHOLD))
self.vel_thresh_entry = tk.Entry(
vel_thresh_frame, textvariable=self.vel_thresh_var, width=8
)
self.vel_thresh_entry.pack(side=tk.LEFT, padx=5)
# Drift Compensation Rate
drift_rate_frame = tk.Frame(right_col)
drift_rate_frame.pack(fill=tk.X, pady=2)
tk.Label(drift_rate_frame, text="Drift Compensation Rate:", width=18).pack(
side=tk.LEFT
)
self.drift_rate_var = tk.StringVar(value=str(DRIFT_COMPENSATION_RATE))
self.drift_rate_entry = tk.Entry(
drift_rate_frame, textvariable=self.drift_rate_var, width=8
)
self.drift_rate_entry.pack(side=tk.LEFT, padx=5)
# Reset Interval
reset_int_frame = tk.Frame(right_col)
reset_int_frame.pack(fill=tk.X, pady=2)
tk.Label(reset_int_frame, text="Reset Interval (s):", width=18).pack(
side=tk.LEFT
)
self.reset_int_var = tk.StringVar(value=str(PERIODIC_RESET_INTERVAL))
self.reset_int_entry = tk.Entry(
reset_int_frame, textvariable=self.reset_int_var, width=8
)
self.reset_int_entry.pack(side=tk.LEFT, padx=5)
# Max Position Error
max_pos_err_frame = tk.Frame(right_col)
max_pos_err_frame.pack(fill=tk.X, pady=2)
tk.Label(max_pos_err_frame, text="Max Position Error (m):", width=18).pack(
side=tk.LEFT
)
self.max_pos_err_var = tk.StringVar(value=str(MAX_POSITION_ERROR))
self.max_pos_err_entry = tk.Entry(
max_pos_err_frame, textvariable=self.max_pos_err_var, width=8
)
self.max_pos_err_entry.pack(side=tk.LEFT, padx=5)
# --- END NEW FUNCTION ---
def toggle_blink(self):
"""Toggle NeoPixel LED blinking on/off"""
# Use inline np_* helpers; reuse existing SyncCrazyflie when present
try:
if not self.blinking:
# Start blinking: update stored color from UI, set it, then start blink.
try:
r = int(self.rgb_r_var.get())
g = int(self.rgb_g_var.get())
b = int(self.rgb_b_var.get())
except Exception:
r, g, b = self.neo_last_color
# Clamp and store
r = max(0, min(255, r))
g = max(0, min(255, g))
b = max(0, min(255, b))
self.neo_last_color = (r, g, b)
cf = (
getattr(scf_instance, "cf", None)
if scf_instance is not None
else None
)
if cf is not None:
_try_send_with_retries(
cf, np_set_all, r, g, b, logger=self.log_to_output
)
_try_send_with_retries(
cf, np_start_blink, 500, 500, logger=self.log_to_output
)
else:
tmp_cf = Crazyflie(rw_cache="./cache")
try:
with SyncCrazyflie(DRONE_URI, cf=tmp_cf) as scf:
tmp = getattr(scf, "cf", tmp_cf)
time.sleep(NP_LINK_SETUP_DELAY)
_try_send_with_retries(
tmp, np_set_all, r, g, b, logger=self.log_to_output
)
_try_send_with_retries(
tmp, np_start_blink, 500, 500, logger=self.log_to_output
)
except Exception as e:
print(f"NeoPixel blink start error: {e}")
raise
self.blinking = True
self.low_battery_blinking = False
self.blink_button.config(text="Stop Blinking", bg="orange")
self.status_var.set("Status: LEDs blinking...")
else:
# Stop blinking
cf = (
getattr(scf_instance, "cf", None)
if scf_instance is not None
else None
)
# Stop blinking but restore last color (do not clear stored RGB)
if cf is not None:
_try_send_with_retries(cf, np_stop_blink, logger=self.log_to_output)
# Restore last color so stop is non-destructive
_try_send_with_retries(
cf, np_set_all, *self.neo_last_color, logger=self.log_to_output
)
else:
tmp_cf = Crazyflie(rw_cache="./cache")
try:
with SyncCrazyflie(DRONE_URI, cf=tmp_cf) as scf:
tmp = getattr(scf, "cf", tmp_cf)
time.sleep(NP_LINK_SETUP_DELAY)
_try_send_with_retries(
tmp, np_stop_blink, logger=self.log_to_output
)
_try_send_with_retries(
tmp,
np_set_all,
*self.neo_last_color,
logger=self.log_to_output,
)
except Exception:
pass
self.blinking = False
self.blink_button.config(text="Blink LEDs", bg="yellow")
self.status_var.set("Status: LEDs stopped (color preserved)")
except Exception as e:
self.status_var.set(f"Status: NeoPixel error - {str(e)}")
print(f"NeoPixel error: {e}")
self.log_to_output(f"NeoPixel Error: {str(e)}")
def toggle_debug_mode(self):
"""Toggle debug mode on/off"""
global DEBUG_MODE
DEBUG_MODE = self.enable_debug_mode_var.get()
mode_text = "ENABLED" if DEBUG_MODE else "DISABLED"
self.status_var.set(f"Status: Debug Mode {mode_text}")
self.log_to_output(
f"Debug Mode {mode_text} - {'Motor commands will be skipped' if DEBUG_MODE else 'Normal flight operations'}"
)
print(f"Debug Mode: {mode_text}")
def set_static_mode(self):
"""Make the current LED color static (stop blinking but keep color)."""
try:
# Always set static color (independent of whether blinking was active).
try:
r = int(self.rgb_r_var.get())
g = int(self.rgb_g_var.get())
b = int(self.rgb_b_var.get())
except Exception:
r, g, b = self.neo_last_color
# Clamp and store the color so future actions reuse it
r = max(0, min(255, r))
g = max(0, min(255, g))
b = max(0, min(255, b))
self.neo_last_color = (r, g, b)
cf = getattr(scf_instance, "cf", None) if scf_instance is not None else None
if cf is not None:
# Stop blink if active and set color
if self.blinking:
_try_send_with_retries(cf, np_stop_blink, logger=self.log_to_output)
_try_send_with_retries(
cf, np_set_all, r, g, b, logger=self.log_to_output
)
else:
tmp_cf = Crazyflie(rw_cache="./cache")
try:
with SyncCrazyflie(DRONE_URI, cf=tmp_cf) as scf:
tmp = getattr(scf, "cf", tmp_cf)
time.sleep(NP_LINK_SETUP_DELAY)
if self.blinking:
_try_send_with_retries(tmp, np_stop_blink)
_try_send_with_retries(tmp, np_set_all, r, g, b)
except Exception as e:
print(f"NeoPixel error setting static: {e}")
return
self.blinking = False
self.low_battery_blinking = False
self.blink_button.config(text="Blink LEDs", bg="yellow")
self.status_var.set("Status: LEDs set to static mode")
except Exception as e:
self.status_var.set(f"Status: NeoPixel error - {str(e)}")
print(f"NeoPixel error: {e}")
self.log_to_output(f"NeoPixel Error: {str(e)}")
def toggle_csv_logging(self):
"""Toggle CSV logging state"""
global DRONE_CSV_LOGGING
DRONE_CSV_LOGGING = self.enable_csv_logging_var.get()
status = "ENABLED" if DRONE_CSV_LOGGING else "DISABLED"
self.log_to_output(f"CSV Logging {status}")
def set_leds_color(self, r, g, b):
"""Set a stable color on the NeoPixels (stops blinking first)."""
try:
# Update stored color so future actions reuse it
try:
r = int(r)
g = int(g)
b = int(b)
except Exception:
pass
r = max(0, min(255, r))
g = max(0, min(255, g))
b = max(0, min(255, b))
self.neo_last_color = (r, g, b)
# If currently blinking, stop it first; then set the color (use set_all)
cf = getattr(scf_instance, "cf", None) if scf_instance is not None else None
if cf is not None:
if self.blinking:
_try_send_with_retries(cf, np_stop_blink, logger=self.log_to_output)
_try_send_with_retries(
cf, np_set_all, r, g, b, logger=self.log_to_output
)
_try_send_with_retries(cf, np_show, logger=self.log_to_output)
else:
tmp_cf = Crazyflie(rw_cache="./cache")
try:
with SyncCrazyflie(DRONE_URI, cf=tmp_cf) as scf:
tmp = getattr(scf, "cf", tmp_cf)
time.sleep(NP_LINK_SETUP_DELAY)
if self.blinking:
_try_send_with_retries(
tmp, np_stop_blink, logger=self.log_to_output
)
_try_send_with_retries(
tmp, np_set_all, r, g, b, logger=self.log_to_output
)
_try_send_with_retries(tmp, np_show, logger=self.log_to_output)
except Exception as e:
self.status_var.set(f"Status: NeoPixel error - {str(e)}")
print(f"NeoPixel error: {e}")
return
self.blinking = False
self.low_battery_blinking = False
self.blink_button.config(text="Blink LEDs", bg="yellow")
self.status_var.set("Status: LEDs set to color")
except Exception as e:
self.status_var.set(f"Status: NeoPixel error - {str(e)}")
print(f"NeoPixel set color error: {e}")
self.log_to_output(f"NeoPixel Error: {str(e)}")
def set_color_from_ui(self):
"""Read R,G,B from UI controls and set LEDs accordingly."""
try:
r = int(self.rgb_r_var.get())
g = int(self.rgb_g_var.get())
b = int(self.rgb_b_var.get())
except Exception:
self.status_var.set("Status: Invalid RGB values")
return
# Clamp values
r = max(0, min(255, r))
g = max(0, min(255, g))
b = max(0, min(255, b))
self.set_leds_color(r, g, b)
def clear_leds(self):
"""Clear all NeoPixels (set to off)."""
try:
cf = getattr(scf_instance, "cf", None) if scf_instance is not None else None
if cf is not None:
_try_send_with_retries(cf, np_stop_blink, logger=self.log_to_output)
_try_send_with_retries(cf, np_clear, logger=self.log_to_output)
else:
tmp_cf = Crazyflie(rw_cache="./cache")
try:
with SyncCrazyflie(DRONE_URI, cf=tmp_cf) as scf:
tmp = getattr(scf, "cf", tmp_cf)
time.sleep(NP_LINK_SETUP_DELAY)
_try_send_with_retries(
tmp, np_stop_blink, logger=self.log_to_output
)
_try_send_with_retries(tmp, np_clear, logger=self.log_to_output)
except Exception:
pass
# Persist the cleared state as the last known color
self.neo_last_color = (0, 0, 0)
self.blinking = False
self.low_battery_blinking = False
self.blink_button.config(text="Blink LEDs", bg="yellow")
self.status_var.set("Status: LEDs cleared")
except Exception as e:
self.status_var.set(f"Status: NeoPixel error - {str(e)}")
print(f"NeoPixel clear error: {e}")
self.log_to_output(f"NeoPixel Error: {str(e)}")
def low_battery_blink_start(self):
"""Start blinking red LEDs for low battery alert"""
if not self.blinking:
try:
cf = (
getattr(scf_instance, "cf", None)
if scf_instance is not None
else None
)
if cf is not None:
_try_send_with_retries(
cf, np_set_all, 255, 0, 0, logger=self.log_to_output
)
_try_send_with_retries(
cf, np_start_blink, 500, 500, logger=self.log_to_output
)
else:
tmp_cf = Crazyflie(rw_cache="./cache")
try:
with SyncCrazyflie(DRONE_URI, cf=tmp_cf) as scf:
tmp = getattr(scf, "cf", tmp_cf)
time.sleep(NP_LINK_SETUP_DELAY)
_try_send_with_retries(
tmp, np_set_all, 255, 0, 0, logger=self.log_to_output
)
_try_send_with_retries(
tmp, np_start_blink, 500, 500, logger=self.log_to_output
)
except Exception as e:
print(f"Low battery blink start error: {e}")
return
self.blinking = True
self.low_battery_blinking = True
self.status_var.set("Status: Low battery - LEDs blinking red")
except Exception as e:
self.status_var.set(f"Status: NeoPixel error - {str(e)}")
print(f"NeoPixel low battery blink error: {e}")
self.log_to_output(f"NeoPixel Error: {str(e)}")
def low_battery_blink_stop(self):
"""Stop low battery blinking and clear LEDs"""
if self.blinking and self.low_battery_blinking:
try:
cf = (
getattr(scf_instance, "cf", None)
if scf_instance is not None
else None
)
if cf is not None:
_try_send_with_retries(cf, np_stop_blink, logger=self.log_to_output)
_try_send_with_retries(cf, np_clear, logger=self.log_to_output)
else:
tmp_cf = Crazyflie(rw_cache="./cache")
try:
with SyncCrazyflie(DRONE_URI, cf=tmp_cf) as scf:
tmp = getattr(scf, "cf", tmp_cf)
time.sleep(NP_LINK_SETUP_DELAY)
_try_send_with_retries(
tmp, np_stop_blink, logger=self.log_to_output
)
_try_send_with_retries(
tmp, np_clear, logger=self.log_to_output
)
except Exception:
pass
self.blinking = False
self.low_battery_blinking = False
self.status_var.set("Status: Battery OK - LEDs cleared")
except Exception as e:
self.status_var.set(f"Status: NeoPixel error - {str(e)}")
print(f"NeoPixel low battery stop error: {e}")
self.log_to_output(f"NeoPixel Error: {str(e)}")
def create_pid_controls(self, parent):
"""Create PID tuning input controls with TRIM controls - compact layout"""
# Main control frame - horizontal layout for PID and TRIM sections
main_control_frame = tk.Frame(parent)
main_control_frame.pack(fill=tk.X, pady=2)
# Left side - PID Controls
pid_frame = tk.LabelFrame(
main_control_frame, text="PID Controls", padx=5, pady=5
)
pid_frame.pack(side=tk.LEFT, fill=tk.Y, padx=(0, 10))
# Position PID Controls (horizontal layout)
pos_frame = tk.LabelFrame(pid_frame, text="Position PID", padx=5, pady=2)
pos_frame.pack(fill=tk.X, pady=2)
pos_row = tk.Frame(pos_frame)
pos_row.pack(fill=tk.X)
# Position Kp
tk.Label(pos_row, text="Kp:", width=3).pack(side=tk.LEFT)
self.pos_kp_var = tk.StringVar(value=str(POSITION_KP))
self.pos_kp_entry = tk.Entry(pos_row, textvariable=self.pos_kp_var, width=6)
self.pos_kp_entry.pack(side=tk.LEFT, padx=2)
# Position Ki
tk.Label(pos_row, text="Ki:", width=3).pack(side=tk.LEFT, padx=(5, 0))
self.pos_ki_var = tk.StringVar(value=str(POSITION_KI))
self.pos_ki_entry = tk.Entry(pos_row, textvariable=self.pos_ki_var, width=6)
self.pos_ki_entry.pack(side=tk.LEFT, padx=2)
# Position Kd
tk.Label(pos_row, text="Kd:", width=3).pack(side=tk.LEFT, padx=(5, 0))
self.pos_kd_var = tk.StringVar(value=str(POSITION_KD))
self.pos_kd_entry = tk.Entry(pos_row, textvariable=self.pos_kd_var, width=6)
self.pos_kd_entry.pack(side=tk.LEFT, padx=2)
# Velocity PID Controls (horizontal layout)
vel_frame = tk.LabelFrame(pid_frame, text="Velocity PID", padx=5, pady=2)
vel_frame.pack(fill=tk.X, pady=2)
vel_row = tk.Frame(vel_frame)
vel_row.pack(fill=tk.X)
# Velocity Kp
tk.Label(vel_row, text="Kp:", width=3).pack(side=tk.LEFT)
self.vel_kp_var = tk.StringVar(value=str(VELOCITY_KP))
self.vel_kp_entry = tk.Entry(vel_row, textvariable=self.vel_kp_var, width=6)
self.vel_kp_entry.pack(side=tk.LEFT, padx=2)
# Velocity Ki
tk.Label(vel_row, text="Ki:", width=3).pack(side=tk.LEFT, padx=(5, 0))
self.vel_ki_var = tk.StringVar(value=str(VELOCITY_KI))
self.vel_ki_entry = tk.Entry(vel_row, textvariable=self.vel_ki_var, width=6)
self.vel_ki_entry.pack(side=tk.LEFT, padx=2)
# Velocity Kd
tk.Label(vel_row, text="Kd:", width=3).pack(side=tk.LEFT, padx=(5, 0))
self.vel_kd_var = tk.StringVar(value=str(VELOCITY_KD))
self.vel_kd_entry = tk.Entry(vel_row, textvariable=self.vel_kd_var, width=6)
self.vel_kd_entry.pack(side=tk.LEFT, padx=2)
# Right side - TRIM Controls
trim_frame = tk.LabelFrame(
main_control_frame, text="TRIM Controls", padx=5, pady=5
)
trim_frame.pack(side=tk.LEFT, fill=tk.Y, padx=(10, 0))
# TRIM VX Control
trim_vx_frame = tk.Frame(trim_frame)
trim_vx_frame.pack(fill=tk.X, pady=5)
tk.Label(trim_vx_frame, text="TRIM VX:", width=10).pack(side=tk.LEFT)
self.trim_vx_var = tk.StringVar(value=str(TRIM_VX))
self.trim_vx_entry = tk.Entry(
trim_vx_frame, textvariable=self.trim_vx_var, width=8
)
self.trim_vx_entry.pack(side=tk.LEFT, padx=2)
# TRIM VY Control
trim_vy_frame = tk.Frame(trim_frame)
trim_vy_frame.pack(fill=tk.X, pady=5)
tk.Label(trim_vy_frame, text="TRIM VY:", width=10).pack(side=tk.LEFT)
self.trim_vy_var = tk.StringVar(value=str(TRIM_VY))
self.trim_vy_entry = tk.Entry(
trim_vy_frame, textvariable=self.trim_vy_var, width=8
)
self.trim_vy_entry.pack(side=tk.LEFT, padx=2)
# Helper labels for TRIM values
trim_help_frame = tk.Frame(trim_frame)
trim_help_frame.pack(fill=tk.X, pady=2)
tk.Label(
trim_help_frame,
text="(Forward/Back, Left/Right)",
font=("Arial", 8),
fg="gray",
).pack()
# Optical Flow Scaling Controls
scale_frame = tk.LabelFrame(
main_control_frame, text="Optical Flow Scaling", padx=5, pady=5
)
scale_frame.pack(side=tk.LEFT, fill=tk.Y, padx=(10, 0))
# Scaling factor control
scale_factor_frame = tk.Frame(scale_frame)
scale_factor_frame.pack(fill=tk.X, pady=5)
tk.Label(scale_factor_frame, text="Scale Factor:", width=12).pack(side=tk.LEFT)
self.scale_factor_var = tk.StringVar(value=str(OPTICAL_FLOW_SCALE))
self.scale_factor_entry = tk.Entry(
scale_factor_frame, textvariable=self.scale_factor_var, width=8
)
self.scale_factor_entry.pack(side=tk.LEFT, padx=2)
# Height scaling checkbox
height_scale_frame = tk.Frame(scale_frame)
height_scale_frame.pack(fill=tk.X, pady=5)
self.height_scaling_var = tk.BooleanVar(value=USE_HEIGHT_SCALING)
self.height_scaling_check = tk.Checkbutton(
height_scale_frame,
text="Use Height Scaling",
variable=self.height_scaling_var,
)
self.height_scaling_check.pack()
# Helper text for scaling
scale_help_frame = tk.Frame(scale_frame)
scale_help_frame.pack(fill=tk.X, pady=2)
tk.Label(
scale_help_frame,
text="(Increase if trajectory too small)",
font=("Arial", 8),
fg="gray",
).pack()
def setup_plots(self):
"""Setup matplotlib plots"""
# Create 2x2 subplot layout
self.ax1 = self.fig.add_subplot(2, 2, 1) # Velocities
self.ax2 = self.fig.add_subplot(2, 2, 2) # Integrated Position (2D plot)
self.ax3 = self.fig.add_subplot(2, 2, 3) # Control Corrections
self.ax4 = self.fig.add_subplot(2, 2, 4) # Height
# Velocities plot
self.ax1.set_title("Velocities (m/s)", fontsize=12)
self.ax1.set_ylabel("Velocity (m/s)")
self.ax1.grid(True, alpha=0.3)
(self.line_vx,) = self.ax1.plot([], [], "b-", linewidth=2, label="VX")
(self.line_vy,) = self.ax1.plot([], [], "r-", linewidth=2, label="VY")
self.ax1.legend(loc='upper left', bbox_to_anchor=(1.0, 1.0), fontsize=8)
# 2D Position plot
self.ax2.set_title("Integrated Position", fontsize=12)
self.ax2.set_xlabel("X Position (m)")
self.ax2.set_ylabel("Y Position (m)")
self.ax2.set_aspect("equal")
self.ax2.grid(True, alpha=0.3)
(self.line_pos,) = self.ax2.plot(
[], [], "purple", linewidth=2, alpha=0.7, label="Trajectory"
)
(self.current_pos,) = self.ax2.plot([], [], "ro", markersize=8, label="Current")
self.ax2.plot(
0,
0,
"ko",
markersize=10,
markerfacecolor="yellow",
markeredgecolor="black",
label="Origin",
)
(self.release_points_scatter,) = self.ax2.plot(
[],
[],
"x",
markersize=10,
markeredgewidth=2,
color="orange",
label="Release Pts",
)
# Move legend outside to the right to prevent shadowing the trajectory
self.ax2.legend(loc='upper left', bbox_to_anchor=(1.0, 1.0), fontsize=9)
# Control corrections plot
# self.ax3.set_title("Control Corrections", fontsize=12)
self.ax3.text(
0.5,
0.95,
"Control Corrections",
transform=self.ax3.transAxes,
ha="center",
va="top",
fontsize=12,
)
self.ax3.set_ylabel("Correction")
self.ax3.grid(True, alpha=0.3)
(self.line_corr_vx,) = self.ax3.plot([], [], "g-", linewidth=2, label="Corr VX")
(self.line_corr_vy,) = self.ax3.plot([], [], "m-", linewidth=2, label="Corr VY")
self.ax3.legend(loc='upper left', bbox_to_anchor=(1.0, 1.0), fontsize=8)
# Height plot
# self.ax4.set_title("Height", fontsize=12)
self.ax4.text(
0.5,
0.95,
"Height",
transform=self.ax4.transAxes,
ha="center",
va="top",
fontsize=12,
)
self.ax4.set_xlabel("Time (s)")
self.ax4.set_ylabel("Height (m)")
self.ax4.grid(True, alpha=0.3)
(self.line_height,) = self.ax4.plot(
[], [], "orange", linewidth=2, label="Height"
)
(self.line_range,) = self.ax4.plot(
[], [], "c--", linewidth=1, alpha=0.8, label="Range (ToF)"
)
self.ax4.axhline(
y=TARGET_HEIGHT, color="red", linestyle="--", alpha=0.7, label="Target"
)
self.ax4.legend(loc='upper left', bbox_to_anchor=(1.0, 1.0), fontsize=8)
self.fig.tight_layout()
# Increased right margin and horizontal spacing for legends
self.fig.subplots_adjust(left=0.07, right=0.88, top=0.94, bottom=0.06, wspace=0.45, hspace=0.3)
def update_plots(self, frame):
"""Update all plots with new data (highly optimized and thread-safe)"""
if not time_history:
return []
# Local snapshots for thread-safe plotting
with data_lock:
# Convert deques to numpy arrays for faster processing
t_hist = np.array(time_history)
vx_hist = np.array(velocity_x_history_plot)
vy_hist = np.array(velocity_y_history_plot)
h_hist = np.array(height_history)
r_hist = np.array(range_height_history)
corr_vx_hist = np.array(correction_vx_history)
corr_vy_hist = np.array(correction_vy_history)
# Trajectory downsampling for long flights
total_traj_pts = len(complete_trajectory_x)
if total_traj_pts > MAX_PLOT_TRAJECTORY_POINTS:
step = total_traj_pts // MAX_PLOT_TRAJECTORY_POINTS
traj_x = np.array(complete_trajectory_x[::step])
traj_y = np.array(complete_trajectory_y[::step])
else:
traj_x = np.array(complete_trajectory_x)
traj_y = np.array(complete_trajectory_y)
# Current values for UI
cur_h = current_height
cur_range = current_range_height
cur_vx = current_vx
cur_vy = current_vy
cur_pos_x = integrated_position_x
cur_pos_y = integrated_position_y
cur_corr_vx = current_correction_vx
cur_corr_vy = current_correction_vy
# Key release points snapshot
rel_points = list(key_release_points)
# Check for stale sensor data (visual only)
is_stale = False
if not DEBUG_MODE and sensor_data_ready:
if time.time() - last_sensor_heartbeat > 1.0:
is_stale = True
# Update real-time value displays
stale_msg = " (STALE!)" if is_stale else ""
self.height_var.set(f"Height: {cur_h:.3f}m{stale_msg}")
self.range_var.set(f"Range: {cur_range:.3f}m{stale_msg}")
self.phase_var.set(f"Phase: {flight_phase}")
if current_battery_voltage > 0:
status = " (LOW!)" if current_battery_voltage < LOW_BATTERY_THRESHOLD else ""
self.battery_var.set(f"Battery: {current_battery_voltage:.2f}V{status}")
else:
self.battery_var.set("Battery: N/A")
self.vx_var.set(f"VX: {cur_vx:.3f} m/s{stale_msg}")
self.vy_var.set(f"VY: {cur_vy:.3f} m/s{stale_msg}")
self.pos_x_var.set(f"Position X: {cur_pos_x:.3f}m{stale_msg}")
self.pos_y_var.set(f"Position Y: {cur_pos_y:.3f}m{stale_msg}")
self.corr_vx_var.set(f"Correction VX: {cur_corr_vx:.3f}")
self.corr_vy_var.set(f"Correction VY: {cur_corr_vy:.3f}")
# Low battery blinking (visual only)
if 0 < current_battery_voltage <= 3.3:
if not self.blinking: self.low_battery_blink_start()
elif current_battery_voltage > 3.3 and self.low_battery_blinking:
self.low_battery_blink_stop()
# Update plots
try:
# 1. Velocities
self.line_vx.set_data(t_hist, vx_hist)
self.line_vy.set_data(t_hist, vy_hist)
# 2. 2D Position
if len(traj_x) > 0:
self.line_pos.set_data(-traj_x, traj_y)
self.current_pos.set_data([-cur_pos_x], [cur_pos_y])
# Update release points scatter
if rel_points:
rx = [-p[0] for p in rel_points]
ry = [p[1] for p in rel_points]
self.release_points_scatter.set_data(rx, ry)
else:
self.release_points_scatter.set_data([], [])
# 3. Control corrections
self.line_corr_vx.set_data(t_hist, corr_vx_hist)
self.line_corr_vy.set_data(t_hist, corr_vy_hist)
# 4. Height
self.line_height.set_data(t_hist, h_hist)
self.line_range.set_data(t_hist, r_hist)
# --- Smart Axis Scaling ---
if len(t_hist) > 1:
t_min, t_max = t_hist[0], t_hist[-1]
# Time axis (X)
cur_xmin, cur_xmax = self.ax1.get_xlim()
if t_max > cur_xmax - (cur_xmax-cur_xmin)*0.1 or t_min < cur_xmin:
margin = (t_max - t_min) * 0.1
for ax in [self.ax1, self.ax3, self.ax4]:
ax.set_xlim(t_min, t_max + margin)
# Velocity Y-axis
v_all = np.concatenate([vx_hist, vy_hist])
v_min, v_max = v_all.min(), v_all.max()
v_margin = max((v_max - v_min) * 0.1, 0.05)
self.ax1.set_ylim(v_min - v_margin, v_max + v_margin)
# Position plot (Centered on trajectory)
if len(traj_x) > 0:
px_min, px_max = -traj_x.max(), -traj_x.min()
py_min, py_max = traj_y.min(), traj_y.max()
range_x, range_y = px_max - px_min, py_max - py_min
max_r = max(range_x, range_y, 0.1)
cx, cy = (px_min + px_max) / 2, (py_min + py_max) / 2
m = max_r * 0.7
self.ax2.set_xlim(cx - m, cx + m)
self.ax2.set_ylim(cy - m, cy + m)
# Corrections Y-axis
c_all = np.concatenate([corr_vx_hist, corr_vy_hist])
c_min, c_max = c_all.min(), c_all.max()
c_margin = max((c_max - c_min) * 0.1, 0.01)
self.ax3.set_ylim(c_min - c_margin, c_max + c_margin)
# Height Y-axis
h_all = np.concatenate([h_hist, r_hist])
h_min, h_max = h_all.min(), h_all.max()
h_margin = max((h_max - h_min) * 0.1, 0.05)
self.ax4.set_ylim(h_min - h_margin, h_max + h_margin)
except Exception as e:
pass # Plotting error (usually frame sync)
return []
# --- NEW FUNCTION: apply_runtime_values ---
def apply_runtime_values(self):
"""Apply runtime adjustable values from GUI inputs"""
global TARGET_HEIGHT, TAKEOFF_TIME, HOVER_DURATION, LANDING_TIME, VELOCITY_SMOOTHING_ALPHA, MAX_CORRECTION
global VELOCITY_THRESHOLD, DRIFT_COMPENSATION_RATE, PERIODIC_RESET_INTERVAL, MAX_POSITION_ERROR
try:
# Get values from GUI
new_target_height = float(self.target_height_var.get())
new_takeoff_time = float(self.takeoff_time_var.get())
new_hover_duration = float(self.hover_duration_var.get())
new_landing_time = float(self.landing_time_var.get())
new_vel_smooth_alpha = float(self.vel_smooth_alpha_var.get())
new_max_corr = float(self.max_corr_var.get())
new_vel_thresh = float(self.vel_thresh_var.get())
new_drift_rate = float(self.drift_rate_var.get())
new_reset_int = float(self.reset_int_var.get())
new_max_pos_err = float(self.max_pos_err_var.get())
# Validate values (optional, add checks as needed)
if new_takeoff_time < 0 or new_hover_duration < 0 or new_landing_time < 0:
raise ValueError("Time values cannot be negative.")
if new_vel_smooth_alpha < 0 or new_vel_smooth_alpha > 1.0:
raise ValueError("Smoothing alpha must be between 0 and 1.")
if new_max_corr < 0:
raise ValueError("Max correction cannot be negative.")
if new_vel_thresh < 0:
raise ValueError("Velocity threshold cannot be negative.")
if new_drift_rate < 0:
raise ValueError("Drift compensation rate cannot be negative.")
if new_reset_int <= 0:
raise ValueError("Reset interval must be positive.")
if new_max_pos_err <= 0:
raise ValueError("Max position error must be positive.")
# Apply values to global variables
TARGET_HEIGHT = new_target_height
TAKEOFF_TIME = new_takeoff_time
HOVER_DURATION = new_hover_duration
LANDING_TIME = new_landing_time
VELOCITY_SMOOTHING_ALPHA = new_vel_smooth_alpha
MAX_CORRECTION = new_max_corr
VELOCITY_THRESHOLD = new_vel_thresh
DRIFT_COMPENSATION_RATE = new_drift_rate
PERIODIC_RESET_INTERVAL = new_reset_int
MAX_POSITION_ERROR = new_max_pos_err
self.log_to_output(f"Runtime Values Applied:")
self.log_to_output(f" Target Height: {TARGET_HEIGHT}")
self.log_to_output(f" Takeoff Time: {TAKEOFF_TIME}")
self.log_to_output(f" Hover Duration: {HOVER_DURATION}")
self.log_to_output(f" Landing Time: {LANDING_TIME}")
self.log_to_output(
f" Velocity Smoothing Alpha: {VELOCITY_SMOOTHING_ALPHA}"
)
self.log_to_output(f" Max Correction: {MAX_CORRECTION}")
self.log_to_output(f" Velocity Threshold: {VELOCITY_THRESHOLD}")
self.log_to_output(f" Drift Compensation Rate: {DRIFT_COMPENSATION_RATE}")
self.log_to_output(f" Reset Interval: {PERIODIC_RESET_INTERVAL}")
self.log_to_output(f" Max Position Error: {MAX_POSITION_ERROR}")
# Log to output window
self.log_to_output("Runtime values applied successfully")
except ValueError as e:
self.log_to_output(f"Error applying runtime values: {e}")
self.log_to_output("Please enter valid numbers for all runtime parameters.")
# --- END NEW FUNCTION ---
def apply_pid_values(self):
"""Apply PID values from GUI inputs"""
global POSITION_KP, POSITION_KI, POSITION_KD, VELOCITY_KP, VELOCITY_KI, VELOCITY_KD
try:
# Get values from GUI
POSITION_KP = float(self.pos_kp_var.get())
POSITION_KI = float(self.pos_ki_var.get())
POSITION_KD = float(self.pos_kd_var.get())
VELOCITY_KP = float(self.vel_kp_var.get())
VELOCITY_KI = float(self.vel_ki_var.get())
VELOCITY_KD = float(self.vel_kd_var.get())
# Reset PID state when applying new values
global position_integral_x, position_integral_y, velocity_integral_x, velocity_integral_y
global last_position_error_x, last_position_error_y, last_velocity_error_x, last_velocity_error_y
position_integral_x = 0.0
position_integral_y = 0.0
velocity_integral_x = 0.0
velocity_integral_y = 0.0
last_position_error_x = 0.0
last_position_error_y = 0.0
last_velocity_error_x = 0.0
last_velocity_error_y = 0.0
self.log_to_output(f"PID Values Applied:")
self.log_to_output(
f"Position: Kp={POSITION_KP}, Ki={POSITION_KI}, Kd={POSITION_KD}"
)
self.log_to_output(
f"Velocity: Kp={VELOCITY_KP}, Ki={VELOCITY_KI}, Kd={VELOCITY_KD}"
)
# Log to output window
self.log_to_output("PID values applied successfully")
except ValueError as e:
self.log_to_output(f"Error applying PID values: {e}")
self.log_to_output("Please enter valid numbers")
def reset_pid_values(self):
"""Reset PID values to default"""
# Default values (from your current settings)
self.pos_kp_var.set("1.2")
self.pos_ki_var.set("0.00")
self.pos_kd_var.set("0.0")
self.vel_kp_var.set("1.2")
self.vel_ki_var.set("0.0")
self.vel_kd_var.set("0.0")
# Apply the reset values
self.apply_pid_values()
self.log_to_output("PID values reset to default")
def apply_all_values(self):
"""Apply PID, TRIM, Optical Flow scaling, and Runtime values from GUI inputs"""
# First apply runtime values
self.apply_runtime_values()
# Then apply PID values
self.apply_pid_values()
# Then apply TRIM values
global TRIM_VX, TRIM_VY, OPTICAL_FLOW_SCALE, USE_HEIGHT_SCALING
try:
TRIM_VX = float(self.trim_vx_var.get())
TRIM_VY = float(self.trim_vy_var.get())
self.log_to_output(f"TRIM Values Applied: VX={TRIM_VX}, VY={TRIM_VY}")
except ValueError as e:
self.log_to_output(f"Error applying TRIM values: {e}")
self.log_to_output("Please enter valid numbers for TRIM values")
# Apply Optical Flow scaling values
try:
OPTICAL_FLOW_SCALE = float(self.scale_factor_var.get())
USE_HEIGHT_SCALING = self.height_scaling_var.get()
self.log_to_output(
f"Optical Flow Scaling Applied: Scale={OPTICAL_FLOW_SCALE}, Height Scaling={USE_HEIGHT_SCALING}"
)
except ValueError as e:
self.log_to_output(f"Error applying Optical Flow scaling: {e}")
self.log_to_output("Please enter valid numbers for scaling factor")
# Apply Joystick sensitivity
try:
global JOYSTICK_SENSITIVITY
JOYSTICK_SENSITIVITY = float(self.joystick_sensitivity_var.get())
if JOYSTICK_SENSITIVITY < 0.1 or JOYSTICK_SENSITIVITY > 2.0:
raise ValueError("Sensitivity must be between 0.1 and 2.0")
self.log_to_output(f"Joystick Sensitivity Applied: {JOYSTICK_SENSITIVITY}")
except ValueError as e:
self.log_to_output(f"Error applying joystick sensitivity: {e}")
self.log_to_output("Please enter a value between 0.1 and 2.0")
def reset_all_values(self):
"""Reset PID, TRIM, and Optical Flow scaling values to default"""
# Reset PID values
self.reset_pid_values()
# Reset TRIM values to current defaults
self.trim_vx_var.set("0.1")
self.trim_vy_var.set("-0.02")
# Reset Optical Flow scaling values
self.scale_factor_var.set("3.7")
self.height_scaling_var.set(False)
# Reset Runtime values to defaults
self.target_height_var.set("0.2")
self.takeoff_time_var.set("1.0")
self.hover_duration_var.set("30.0")
self.landing_time_var.set("0.5")
self.vel_smooth_alpha_var.set("0.8")
self.max_corr_var.set("0.1")
self.vel_thresh_var.set("0.005")
self.drift_rate_var.set("0.003")
self.reset_int_var.set("30.0")
self.max_pos_err_var.set("2.0")
# Reset Joystick sensitivity
self.joystick_sensitivity_var.set("0.5")
# Apply all values
global TRIM_VX, TRIM_VY, OPTICAL_FLOW_SCALE, USE_HEIGHT_SCALING
global TARGET_HEIGHT, TAKEOFF_TIME, HOVER_DURATION, LANDING_TIME, VELOCITY_SMOOTHING_ALPHA, MAX_CORRECTION
global VELOCITY_THRESHOLD, DRIFT_COMPENSATION_RATE, PERIODIC_RESET_INTERVAL, MAX_POSITION_ERROR
global JOYSTICK_SENSITIVITY
TRIM_VX = 0.1
TRIM_VY = -0.02
OPTICAL_FLOW_SCALE = 3.7
USE_HEIGHT_SCALING = False
TARGET_HEIGHT = 0.2
TAKEOFF_TIME = 1.0
HOVER_DURATION = 30.0
LANDING_TIME = 0.5
VELOCITY_SMOOTHING_ALPHA = 0.8
MAX_CORRECTION = 0.1
VELOCITY_THRESHOLD = 0.005
DRIFT_COMPENSATION_RATE = 0.003
PERIODIC_RESET_INTERVAL = 30.0
MAX_POSITION_ERROR = 2.0
JOYSTICK_SENSITIVITY = 0.5
self.log_to_output("All values reset to default")
def toggle_output_window(self):
"""Toggle the output window visibility"""
self.show_output_window = self.show_output_window_var.get()
# Show message that change will take effect on restart
self.status_var.set("Status: Output window setting changed - restart required")
self.log_to_output(
"Output window visibility changed - restart the application to apply"
)
def clear_output(self):
"""Clear the output log window"""
if hasattr(self, "output_text") and self.output_text is not None:
self.output_text.delete(1.0, tk.END)
self.log_to_output("Output window cleared")
def save_output_log(self):
"""Save the output log to a file"""
if hasattr(self, "output_text") and self.output_text is not None:
try:
# Get all text from the output window
log_content = self.output_text.get(1.0, tk.END).strip()
if not log_content:
self.status_var.set("Status: No log content to save")
return
# Create filename with timestamp
timestamp = datetime.now().strftime("%Y%m%d_%H%M%S")
filename = f"drone_output_log_{timestamp}.txt"
# Save to file
with open(filename, "w", encoding="utf-8") as f:
f.write(log_content)
self.status_var.set(f"Status: Log saved to {filename}")
self.log_to_output(f"Output log saved to: {filename}")
except Exception as e:
error_msg = f"Failed to save log: {str(e)}"
self.status_var.set(f"Status: {error_msg}")
self.log_to_output(error_msg)
else:
self.status_var.set("Status: Output window not available")
def log_to_output(self, message):
"""Log a message to the output window (Thread-Safe)"""
# Check if we are on the main thread
if threading.current_thread() is threading.main_thread():
self._log_internal(message)
else:
# Schedule update on main thread
self.root.after(0, lambda: self._log_internal(message))
def _log_internal(self, message):
"""Internal logging method intended to run on main thread"""
if hasattr(self, "output_text") and self.output_text is not None:
timestamp = time.strftime("%H:%M:%S")
try:
self.output_text.insert(tk.END, f"[{timestamp}] {message}\n")
self.output_text.see(tk.END) # Auto-scroll to bottom
except Exception:
pass # Ignore tkinter errors if window is destroying
def update_status(self, message):
"""Thread-safe status update"""
self.root.after(0, lambda: self.status_var.set(message))
def update_button(self, button, **kwargs):
"""Thread-safe button configuration update"""
self.root.after(0, lambda: button.config(**kwargs))
def safe_set_var(self, variable, value):
"""Thread-safe variable set"""
self.root.after(0, lambda: variable.set(value))
def clear_graphs(self):
"""Clear all graph data and reset plotting"""
global time_history, velocity_x_history_plot, velocity_y_history_plot
global position_x_history, position_y_history, correction_vx_history, correction_vy_history
global height_history, complete_trajectory_x, complete_trajectory_y, start_time
# Clear all history arrays
time_history.clear()
velocity_x_history_plot.clear()
velocity_y_history_plot.clear()
position_x_history.clear()
position_y_history.clear()
correction_vx_history.clear()
correction_vy_history.clear()
height_history.clear()
range_height_history.clear()
complete_trajectory_x.clear()
complete_trajectory_x.clear()
complete_trajectory_y.clear()
key_release_points.clear()
# Reset start time
start_time = None
# Clear plot lines
if hasattr(self, "line_vx"):
self.line_vx.set_data([], [])
if hasattr(self, "line_vy"):
self.line_vy.set_data([], [])
if hasattr(self, "line_pos"):
self.line_pos.set_data([], [])
if hasattr(self, "release_points_scatter"):
self.release_points_scatter.set_data([], [])
if hasattr(self, "line_corr_vx"):
self.line_corr_vx.set_data([], [])
if hasattr(self, "line_corr_vy"):
self.line_corr_vy.set_data([], [])
if hasattr(self, "line_height"):
self.line_height.set_data([], [])
if hasattr(self, "line_range"):
self.line_range.set_data([], [])
# Redraw the plots
if hasattr(self, "canvas"):
self.canvas.draw()
self.log_to_output("Graphs cleared")
def start_continuous_movement(self, key):
"""Start continuous movement for GUI buttons"""
if not self.joystick_active:
return
key = key.lower()
if key in ["w", "a", "s", "d"]:
# Set joystick key for control thread
self.joystick_keys[key] = True
# Update status
active_keys = [k.upper() for k, v in self.joystick_keys.items() if v]
self.joystick_status_var.set(f"Joystick: ACTIVE ({','.join(active_keys)})")
# Log button press
self.log_to_output(
f"Continuous movement: {self._key_to_direction(key)} started"
)
def stop_continuous_movement(self, key):
"""Stop continuous movement for GUI buttons"""
if not self.joystick_active:
return
key = key.lower()
if key in ["w", "a", "s", "d"]:
# Clear joystick key for control thread
self.joystick_keys[key] = False
# Update status
active_keys = [k.upper() for k, v in self.joystick_keys.items() if v]
if active_keys:
self.joystick_status_var.set(
f"Joystick: ACTIVE ({','.join(active_keys)})"
)
else:
self.joystick_status_var.set("Joystick: ACTIVE")
# Log button release with hold mode info when all keys released
if not any(self.joystick_keys.values()):
mode_info = (
" - Returning to origin"
if self.joystick_hold_at_origin
else " - Holding current position"
)
self.log_to_output(
f"Continuous movement: {self._key_to_direction(key)} stopped{mode_info}"
)
else:
self.log_to_output(
f"Continuous movement: {self._key_to_direction(key)} stopped"
)
def _key_to_direction(self, key):
"""Convert key to direction name"""
directions = {
"w": "Forward (W)",
"a": "Left (A)",
"s": "Backward (S)",
"d": "Right (D)",
}
return directions.get(key, key.upper())
def toggle_joystick_hold_mode(self):
"""Toggle joystick position hold mode between origin and current position"""
self.joystick_hold_at_origin = self.joystick_hold_origin_var.get()
if self.joystick_hold_at_origin:
mode_text = "Origin mode: Drone will return to takeoff point when releasing joystick"
else:
mode_text = "Current position mode: Drone will hold at the position where joystick is released"
self.log_to_output(f"Joystick hold mode changed: {mode_text}")
self.log_to_output(
f"Joystick hold mode: {'Hold at Origin' if self.joystick_hold_at_origin else 'Hold at Current Position'}"
)
def start_sensor_test(self): # New function for sensor test
"""Start the sensor test in a separate thread"""
if (
not self.sensor_test_running and not self.flight_running
): # Prevent starting if flight is active
self.sensor_test_running = True
self.sensor_test_button.config(
text="Stop Sensor Test", command=self.stop_sensor_test, bg="red"
)
self.status_var.set("Status: Starting Sensor Test...")
self.sensor_test_thread = threading.Thread(
target=self.sensor_test_controller_thread
)
self.sensor_test_thread.daemon = True
self.sensor_test_thread.start()
elif self.flight_running:
print("Cannot start Sensor Test while Flight is active.")
self.status_var.set("Status: Flight Active - Cannot Test Sensors")
def stop_sensor_test(self):
"""Stop the sensor test"""
if self.sensor_test_running:
global sensor_test_active
sensor_test_active = False
self.sensor_test_running = False
if self.sensor_test_thread and self.sensor_test_thread.is_alive():
self.sensor_test_thread.join(timeout=2.0)
self.status_var.set("Status: Sensor test stopped")
self.sensor_test_button.config(
text="Sensor Test", command=self.start_sensor_test, bg="lightblue"
)
def reset_battery(self):
"""Reset battery voltage reading to allow new flights with fresh batteries"""
global current_battery_voltage, battery_data_ready
current_battery_voltage = 0.0
battery_data_ready = False
self.battery_var.set("Battery: RESET - Waiting for new reading")
self.status_var.set(
"Status: Battery voltage reset. New reading will update shortly."
)
self.log_to_output("Battery voltage reset to 0.0V")
def sensor_test_controller_thread(self): # New thread function for sensor test
"""Sensor test controller running in separate thread"""
global flight_phase, sensor_test_active, scf_instance
global integrated_position_x, integrated_position_y, last_integration_time, last_reset_time
global position_integration_enabled # Need to access this to enable integration
global current_battery_voltage, battery_data_ready # Reset battery on new connection
# Clear previous run data at start of new sensor test
self.root.after(0, lambda: self.clear_output())
self.root.after(0, lambda: self.clear_graphs())
# Reset position immediately to update GUI (fix reset delay)
integrated_position_x = 0.0
integrated_position_y = 0.0
last_integration_time = time.time()
# Reset PID state as well
position_integral_x = 0.0
position_integral_y = 0.0
sensor_test_active = True
flight_phase = "SENSOR_TEST" # Update phase
# Reset battery voltage for new connection
current_battery_voltage = 0.0
battery_data_ready = False
cflib.crtp.init_drivers()
cf = Crazyflie(rw_cache="./cache")
log_motion = None
log_battery = None
try:
with SyncCrazyflie(DRONE_URI, cf=cf) as scf:
scf_instance = scf
# Enable NeoPixel controls now that a Crazyflie link is established
try:
self.update_button(self.blink_button, state=tk.NORMAL)
self.update_button(self.clear_leds_button, state=tk.NORMAL)
self.update_button(self.set_color_button, state=tk.NORMAL)
except Exception:
pass
# Setup logging (same as flight)
log_motion, log_battery = setup_logging(cf)
use_position_hold = log_motion is not None
if use_position_hold:
time.sleep(1.0)
# Initialize flight parameters (skip if in debug mode, but logging still happens)
if not DEBUG_MODE:
cf.commander.send_setpoint(0, 0, 0, 0)
time.sleep(0.1)
cf.param.set_value("commander.enHighLevel", "1")
time.sleep(0.5)
else:
self.log_to_output(
"DEBUG MODE: Skipping flight initialization for sensor test"
)
# Enable position integration for sensor test
reset_position_tracking()
# Run sensor test loop (no motor commands)
flight_phase = "SENSOR_TEST"
start_time = time.time()
if self.enable_sensor_logging_var.get():
init_csv_logging(logger=self.log_to_output)
while sensor_test_active: # Continue while sensor test is active
# Safety check: link and sensor stale
if not check_link_safety(cf, logger=self.log_to_output):
sensor_test_active = False
break
# Calculate corrections (they will be 0 if PID params are 0, but still updates internal state)
if use_position_hold and sensor_data_ready:
motion_vx, motion_vy = calculate_position_hold_corrections()
# Check for periodic reset
if periodic_position_reset():
flight_phase = "SENSOR_TEST (RESET)"
else:
flight_phase = "SENSOR_TEST"
time.sleep(CONTROL_UPDATE_RATE) # Maintain control loop rate
if self.enable_sensor_logging_var.get():
log_to_csv()
except Exception as e:
flight_phase = "ERROR"
self.log_to_output(f"Sensor Test Error: {str(e)}")
finally:
# Stop logging
if self.enable_sensor_logging_var.get():
close_csv_logging(logger=self.log_to_output)
if log_motion:
try:
log_motion.stop()
except:
pass
if log_battery:
try:
log_battery.stop()
except:
pass
# Disable NeoPixel controls when sensor test stops
# Disable NeoPixel controls when sensor test stops
try:
self.update_button(self.blink_button, state=tk.DISABLED)
self.update_button(self.clear_leds_button, state=tk.DISABLED)
self.update_button(self.set_color_button, state=tk.DISABLED)
except Exception:
pass
sensor_test_active = False
flight_phase = "IDLE"
self.sensor_test_running = False
self.update_button(
self.sensor_test_button,
text="Sensor Test",
command=self.start_sensor_test,
bg="lightblue",
)
self.update_status("Status: Sensor Test Stopped")
def start_flight(self):
"""Start the flight in a separate thread with battery and sensor safety checks"""
if not self.flight_running and not self.sensor_test_running:
# Battery safety check
if (
current_battery_voltage > 0
and current_battery_voltage < LOW_BATTERY_THRESHOLD
):
self.status_var.set(
f"Status: Battery too low ({current_battery_voltage:.2f}V)! Cannot start flight."
)
self.log_to_output(
f"SAFETY: Flight blocked - Battery voltage {current_battery_voltage:.2f}V is below 3.5V minimum"
)
return
elif current_battery_voltage == 0.0:
self.log_to_output("WARNING: Battery voltage unknown")
# SENSOR SAFETY CHECK: ensure height and motion data are flowing
if not sensor_data_ready:
self.status_var.set(
"Status: Sensor data not ready! Wait for height & motion readings."
)
self.log_to_output(
"SAFETY: Flight blocked - No sensor data received yet."
)
return
if current_height <= 0.0: # e.g., drone on ground or invalid
self.status_var.set(
"Status: Invalid height reading! Ensure drone is powered and sensors active."
)
self.log_to_output(
"SAFETY: Flight blocked - Height too low or invalid:",
current_height,
)
return
# Proceed
self.flight_running = True
self.start_button.config(
text="Stop Flight", command=self.emergency_stop, bg="red"
)
self.status_var.set("Status: Starting Flight...")
self.flight_thread = threading.Thread(target=self.flight_controller_thread)
self.flight_thread.daemon = True
self.flight_thread.start()
# Log to output window
self.log_to_output("Flight started")
elif self.sensor_test_running:
self.log_to_output("Cannot start Flight while Sensor Test is active.")
self.status_var.set("Status: Sensor Test Active - Cannot Start Flight")
def emergency_stop(self):
"""Emergency stop the flight or sensor test"""
global flight_active, sensor_test_active
flight_active = False
sensor_test_active = False # Stop sensor test as well
self.flight_running = False
self.sensor_test_running = False # Reset sensor test flag
self.start_button.config(
text="Start Flight", command=self.start_flight, bg="green"
)
self.sensor_test_button.config(
text="Sensor Test", command=self.start_sensor_test, bg="lightblue"
)
# Also stop joystick control if active
if self.joystick_active:
self.joystick_active = False
global maneuver_active
maneuver_active = False
# Clear all joystick keys
self.joystick_keys = {"w": False, "a": False, "s": False, "d": False}
self.key_pressed_flags = {"w": False, "a": False, "s": False, "d": False}
# Update joystick status
self.joystick_status_var.set("Joystick: EMERGENCY STOP")
# Update UI buttons
self.start_joystick_button.config(state=tk.NORMAL)
# Log joystick stop
self.log_to_output("Joystick control emergency stopped")
self.status_var.set("Status: Emergency Stopped")
def flight_controller_thread(self):
"""Flight controller running in separate thread"""
global flight_phase, flight_active, scf_instance
global integrated_position_x, integrated_position_y, last_integration_time, last_reset_time
global maneuver_active, target_position_x, target_position_y
global shape_active, shape_waypoints, shape_index, waypoint_start_time
global current_battery_voltage, battery_data_ready # Reset battery on new connection
global position_integral_x, position_integral_y # PID integral terms
global waypoint_start_time # Ensure timer is reset
# Clear previous run data at start of new flight
self.root.after(0, lambda: self.clear_output())
self.root.after(0, lambda: self.clear_graphs())
# Reset position immediately to update GUI (fix reset delay)
integrated_position_x = 0.0
integrated_position_y = 0.0
# Implicitly reset target position to origin for standard flight if no maneuver is active
# This allows maneuvers to be started from IDLE while preserving their target coordinates
if not maneuver_active:
target_position_x = 0.0
target_position_y = 0.0
last_integration_time = time.time()
# Reset PID state as well
position_integral_x = 0.0
position_integral_y = 0.0
waypoint_start_time = time.time() # Reset timer at start of flight thread
cflib.crtp.init_drivers()
cf = Crazyflie(rw_cache="./cache")
log_motion = None
log_battery = None
# Reset battery voltage for new connection
current_battery_voltage = 0.0
battery_data_ready = False
try:
flight_phase = "CONNECTING"
with SyncCrazyflie(DRONE_URI, cf=cf) as scf:
scf_instance = scf
flight_active = True
# Apply firmware parameters right after connection
apply_firmware_parameters(cf, logger=self.log_to_output)
# Setup logging
flight_phase = "SETUP"
log_motion, log_battery = setup_logging(cf, logger=self.log_to_output)
use_position_hold = log_motion is not None
if use_position_hold:
time.sleep(1.0)
# Reset position tracking immediately after logging setup for faster initialization
reset_position_tracking()
# SAFETY CHECK: Verify position integration reset was successful before takeoff
if (
not position_integration_enabled
or integrated_position_x != 0.0
or integrated_position_y != 0.0
):
error_msg = f"SAFETY: Position integration reset failed! Integration enabled: {position_integration_enabled}, Position: ({integrated_position_x:.3f}, {integrated_position_y:.3f}). Cannot start flight."
self.log_to_output(error_msg)
flight_phase = "SAFETY_ERROR"
raise Exception(error_msg)
# Initialize flight (skip if in debug mode)
if not DEBUG_MODE:
cf.commander.send_setpoint(0, 0, 0, 0)
time.sleep(0.1)
cf.param.set_value("commander.enHighLevel", "1")
time.sleep(0.5)
else:
self.log_to_output("DEBUG MODE: Skipping flight initialization")
# Takeoff (position integration enabled from start for safety)
flight_phase = "TAKEOFF"
if DEBUG_MODE:
self.log_to_output("DEBUG MODE: Simulating takeoff phase")
start_time = time.time()
init_csv_logging(logger=self.log_to_output)
# Height sensor validation during takeoff
takeoff_height_start = current_height
height_sensor_min_change = HEIGHT_SENSOR_MIN_CHANGE
while time.time() - start_time < TAKEOFF_TIME and flight_active:
# Safety check: link and sensor stale
if not check_link_safety(cf, logger=self.log_to_output):
flight_active = False
break
# Calculate elapsed time for takeoff ramp
elapsed_takeoff_time = time.time() - start_time
if not DEBUG_MODE:
# Enable control corrections during takeoff if height is sufficient (> 5cm)
# This prevents drift during the 1.5s takeoff phase
if use_position_hold and sensor_data_ready and current_height > 0.04:
# Hold at origin (0,0) during takeoff regardless of maneuver target
motion_vx, motion_vy = calculate_position_hold_corrections(0.0, 0.0)
else:
motion_vx, motion_vy = 0.0, 0.0
# Apply corrections (TRIM + PID output)
total_vx = TRIM_VX + motion_vy
total_vy = TRIM_VY + motion_vx
# SMOOTH TAKEOFF RAMP: Gradually increase height target to minimize bouncing
if ENABLE_TAKEOFF_RAMP:
# Calculate progress (0.0 to 1.0)
takeoff_progress = min(1.0, elapsed_takeoff_time / TAKEOFF_TIME)
# Ramp from current ground height to target height
command_height = takeoff_height_start + (TARGET_HEIGHT - takeoff_height_start) * takeoff_progress
else:
# Direct target height (leveraging firmware's internal ramp or jumping to height)
command_height = TARGET_HEIGHT
cf.commander.send_hover_setpoint(
total_vx, total_vy, 0, command_height
)
log_to_csv()
time.sleep(CONTROL_UPDATE_RATE)
# POST-TAKEOFF SAFETY CHECK: Verify height sensor worked during full takeoff period
takeoff_duration = time.time() - start_time
final_height_change = current_height - takeoff_height_start
if ENABLE_HEIGHT_SENSOR_SAFETY and final_height_change < height_sensor_min_change and not DEBUG_MODE:
# Height sensor appears stuck despite full takeoff thrust period - emergency stop
emergency_msg = (
f"EMERGENCY STOP: Height sensor failure detected! "
f"Height stuck at {current_height:.3f}m (change: {final_height_change:.3f}m) "
f"after full {takeoff_duration:.1f}s takeoff to {TARGET_HEIGHT:.3f}m target. "
f"Expected >{height_sensor_min_change:.3f}m change with commanded thrust."
)
self.log_to_output(emergency_msg)
flight_phase = "EMERGENCY_HEIGHT_SENSOR"
# Emergency stop motors
cf.commander.send_setpoint(0, 0, 0, 0)
raise Exception(emergency_msg)
# Height stabilization phase - wait for drone to stabilize at target height
flight_phase = "STABILIZING"
if DEBUG_MODE:
self.log_to_output("DEBUG MODE: Simulating stabilization phase")
stabilization_start = time.time()
stabilization_duration = 3.0 # 3 seconds to stabilize
# Height sensor validation during stabilization
stabilization_height_check_start = time.time()
stabilization_height_timeout = 2.0 # seconds - if height doesn't stabilize within this time, check sensor
while (
time.time() - stabilization_start < stabilization_duration
and flight_active
):
# Safety check: link and sensor stale
if not check_link_safety(cf, logger=self.log_to_output):
flight_active = False
break
# HEIGHT SENSOR SAFETY CHECK: Detect stuck/frozen height sensor during stabilization
stabilization_elapsed = (
time.time() - stabilization_height_check_start
)
# After 2 seconds of stabilization, check if height is reasonably close to target
if (
ENABLE_HEIGHT_SENSOR_SAFETY and stabilization_elapsed > stabilization_height_timeout
and abs(current_height - TARGET_HEIGHT)
> 0.3 # Allow 30cm tolerance
and not DEBUG_MODE
):
# Height sensor may be stuck - the drone should be at target height but isn't
emergency_msg = (
f"EMERGENCY STOP: Height sensor failure during stabilization! "
f"Height: {current_height:.3f}m, Target: {TARGET_HEIGHT:.3f}m "
f"(error: {abs(current_height - TARGET_HEIGHT):.3f}m) after {stabilization_elapsed:.1f}s. "
f"Height sensor appears stuck or inaccurate."
)
self.log_to_output(emergency_msg)
flight_phase = "EMERGENCY_HEIGHT_SENSOR_STABILIZATION"
# Emergency stop motors
cf.commander.send_setpoint(0, 0, 0, 0)
raise Exception(emergency_msg)
if use_position_hold and sensor_data_ready:
# Hold at origin (0,0) during stabilization phase
motion_vx, motion_vy = calculate_position_hold_corrections(0.0, 0.0)
else:
motion_vx, motion_vy = 0.0, 0.0
log_to_csv()
# Apply corrections (note: axes swapped)
total_vx = TRIM_VX + motion_vy
total_vy = TRIM_VY + motion_vx
if not DEBUG_MODE:
cf.commander.send_hover_setpoint(
total_vx, total_vy, 0, TARGET_HEIGHT
)
time.sleep(CONTROL_UPDATE_RATE)
# Position hold hover or maneuver - Main Loop
hover_start_time = None
waypoint_arrival_time = None # Track when we reach a corner
while flight_active:
if maneuver_active:
flight_phase = "MISSION"
if not check_link_safety(cf, logger=self.log_to_output):
flight_active = False
break
if use_position_hold and sensor_data_ready:
motion_vx, motion_vy = calculate_position_hold_corrections()
distance_to_target = ((integrated_position_x - target_position_x)**2 +
(integrated_position_y - target_position_y)**2)**0.5
# Log progress every 0.5s
if int(time.time() * 2) % 4 == 0:
self.log_to_output(f"MISSION: Dist={distance_to_target:.3f}m, Target=({target_position_x:.2f}, {target_position_y:.2f})")
# Check completion and handle stabilization
if distance_to_target < MANEUVER_THRESHOLD:
if waypoint_arrival_time is None:
waypoint_arrival_time = time.time()
self.log_to_output(f"Waypoint {shape_index if shape_active else ''} reached! Stabilizing for {WAYPOINT_STABILIZATION_TIME}s...")
# Wait for stabilization time
if time.time() - waypoint_arrival_time >= WAYPOINT_STABILIZATION_TIME:
waypoint_arrival_time = None # Reset for next waypoint
if shape_active and shape_index < len(shape_waypoints) - 1:
shape_index += 1
target_position_x, target_position_y = shape_waypoints[shape_index]
self.log_to_output(f"Moving to next waypoint: ({target_position_x:.2f}, {target_position_y:.2f})")
# Do NOT reset integrals for next leg to preserve auto-trim balance
# reset_position_tracking(reset_integrals=False)
else:
self.log_to_output(f"Mission target reached at ({integrated_position_x:.2f}, {integrated_position_y:.2f})!")
maneuver_active = False
shape_active = False
# When mission ends, we'll enter HOVER mode in next iteration
hover_start_time = time.time() # Start hover timer
else:
# Still moving toward target, reset arrival time if we drift away
waypoint_arrival_time = None
else:
motion_vx, motion_vy = 0.0, 0.0
total_vx = TRIM_VX + motion_vy
total_vy = TRIM_VY + motion_vx
if not DEBUG_MODE:
cf.commander.send_hover_setpoint(total_vx, total_vy, 0, TARGET_HEIGHT)
log_to_csv()
time.sleep(CONTROL_UPDATE_RATE)
else:
# HOVER Mode
if hover_start_time is None:
hover_start_time = time.time()
elapsed_hover = time.time() - hover_start_time
if elapsed_hover >= HOVER_DURATION:
self.log_to_output(f"Hover duration ({HOVER_DURATION}s) completed.")
break # Exit main loop to land
flight_phase = "HOVER"
if use_position_hold and sensor_data_ready:
motion_vx, motion_vy = calculate_position_hold_corrections()
# Check for periodic reset
if periodic_position_reset():
flight_phase = "HOVER (RESET)"
else:
motion_vx, motion_vy = 0.0, 0.0
log_to_csv()
total_vx = TRIM_VX + motion_vy
total_vy = TRIM_VY + motion_vx
if not DEBUG_MODE:
cf.commander.send_hover_setpoint(total_vx, total_vy, 0, TARGET_HEIGHT)
time.sleep(CONTROL_UPDATE_RATE)
# Landing with stabilization
flight_phase = "LANDING"
if DEBUG_MODE:
self.log_to_output("DEBUG MODE: Simulating landing phase")
start_time = time.time()
while (
time.time() - start_time < LANDING_TIME and flight_active
):
if use_position_hold and sensor_data_ready:
motion_vx, motion_vy = calculate_position_hold_corrections()
else:
motion_vx, motion_vy = 0.0, 0.0
# Apply corrections even during landing to prevent drift
total_vx = TRIM_VX + motion_vy
total_vy = TRIM_VY + motion_vx
if not DEBUG_MODE:
# Command height 0.0 to descend while maintaining horizontal position
cf.commander.send_hover_setpoint(total_vx, total_vy, 0, 0.0)
log_to_csv()
time.sleep(CONTROL_UPDATE_RATE)
# Stop motors
if not DEBUG_MODE:
cf.commander.send_setpoint(0, 0, 0, 0)
time.sleep(0.1) # Brief wait to ensure stop command is processed
flight_phase = "COMPLETE"
except Exception as e:
error_msg = str(e)
flight_phase = "ERROR"
# Log the error message content to output
self.log_to_output(f"Flight Error: {error_msg}")
finally:
# Stop logging
close_csv_logging(logger=self.log_to_output)
if log_motion:
try:
log_motion.stop()
except:
pass
if log_battery:
try:
log_battery.stop()
except:
pass
flight_active = False
self.flight_running = False
self.update_button(
self.start_button,
text="Start Flight",
command=self.start_flight,
bg="green",
)
if flight_phase != "COMPLETE":
self.update_status(f"Status: {flight_phase}")
else:
self.update_status("Status: Flight Complete")
def start_joystick_control(self):
"""Start joystick control using keyboard input"""
if (
not self.joystick_active
and not self.flight_running
and not self.sensor_test_running
):
try:
# Get sensitivity value
JOYSTICK_SENSITIVITY = float(self.joystick_sensitivity_var.get())
if JOYSTICK_SENSITIVITY < 0.1 or JOYSTICK_SENSITIVITY > 2.0:
raise ValueError("Sensitivity must be between 0.1 and 2.0")
# Battery safety check
if (
current_battery_voltage > 0
and current_battery_voltage < LOW_BATTERY_THRESHOLD
):
self.status_var.set(
f"Status: Battery too low ({current_battery_voltage:.2f}V)! Cannot start joystick control."
)
return
elif current_battery_voltage == 0.0:
self.log_to_output("WARNING: Battery voltage unknown")
# SENSOR SAFETY CHECK
if not sensor_data_ready:
self.status_var.set(
"Status: Sensor data not ready! Wait for height & motion readings."
)
return
if current_height <= 0.0:
self.status_var.set(
"Status: Invalid height reading! Ensure drone is powered and sensors active."
)
return
# Start joystick control
self.joystick_active = True
self.start_joystick_button.config(state=tk.DISABLED)
# self.stop_joystick_button.config(state=tk.NORMAL) # Removed duplicate stop button
self.joystick_status_var.set("Joystick: ACTIVE")
self.status_var.set(
"Status: Joystick Control Starting - Stabilizing height first..."
)
# Log to output window
self.log_to_output("Joystick control started")
# Initialize joystick target position based on hold mode
global target_position_x, target_position_y, maneuver_active
if self.joystick_hold_at_origin:
# Hold at Origin mode: Set target to origin (0, 0)
target_position_x = 0.0
target_position_y = 0.0
self.log_to_output(
"Joystick mode: Hold at Origin - will return to takeoff point when released"
)
else:
# Hold at Current Position mode: Set target to current position
target_position_x = integrated_position_x
target_position_y = integrated_position_y
self.log_to_output(
"Joystick mode: Hold at Current Position - will maintain position when released"
)
maneuver_active = False # Disable maneuver damping for sharper joystick response
# Force focus to the window for key events
self.root.focus_force()
# Start joystick control thread
self.joystick_thread = threading.Thread(
target=self.joystick_control_thread
)
self.joystick_thread.daemon = True
self.joystick_thread.start()
except ValueError as e:
self.status_var.set(f"Status: Invalid sensitivity value - {str(e)}")
elif self.flight_running:
self.status_var.set("Status: Cannot start joystick while flight is active")
elif self.sensor_test_running:
self.status_var.set(
"Status: Cannot start joystick while sensor test is active"
)
def stop_joystick_control(self):
"""Stop joystick control"""
if self.joystick_active:
self.joystick_active = False
global maneuver_active
maneuver_active = False
# Wait for thread to finish
if self.joystick_thread and self.joystick_thread.is_alive():
self.joystick_thread.join(timeout=1.0)
# Update UI
self.start_joystick_button.config(state=tk.NORMAL)
# self.stop_joystick_button.config(state=tk.DISABLED) # Removed duplicate stop button
self.joystick_status_var.set("Joystick: INACTIVE")
self.status_var.set("Status: Joystick Control Stopped")
# Log to output window
self.log_to_output("Joystick control stopped")
def joystick_control_thread(self):
"""Joystick control thread that handles position updates"""
global target_position_x, target_position_y, maneuver_active, flight_active
global current_battery_voltage, battery_data_ready # Reset battery on new connection
global integrated_position_x, integrated_position_y # Need access to current position
global last_integration_time, last_reset_time # Need to reset integration timing
global position_integration_enabled # Control position integration
global position_integral_x, position_integral_y, velocity_integral_x, velocity_integral_y
global last_position_error_x, last_position_error_y, last_velocity_error_x, last_velocity_error_y
# Clear previous run data at start of new joystick control
self.root.after(0, lambda: self.clear_output())
self.root.after(0, lambda: self.clear_graphs())
# Reset position immediately to update GUI (fix reset delay)
integrated_position_x = 0.0
integrated_position_y = 0.0
last_integration_time = time.time()
# Reset PID state as well
position_integral_x = 0.0
position_integral_y = 0.0
cflib.crtp.init_drivers()
cf = Crazyflie(rw_cache="./cache")
log_motion = None
log_battery = None
# Reset battery voltage for new connection
current_battery_voltage = 0.0
battery_data_ready = False
try:
with SyncCrazyflie(DRONE_URI, cf=cf) as scf:
scf_instance = scf
flight_active = True
# Apply firmware parameters right after connection
apply_firmware_parameters(cf, logger=self.log_to_output)
# Setup logging
log_motion, log_battery = setup_logging(cf, logger=self.log_to_output)
use_position_hold = log_motion is not None
if use_position_hold:
time.sleep(1.0)
# Reset position tracking immediately after logging setup for faster initialization
reset_position_tracking()
# SAFETY CHECK: Verify position integration reset was successful before takeoff
if (
not position_integration_enabled
or integrated_position_x != 0.0
or integrated_position_y != 0.0
):
error_msg = f"SAFETY: Position integration reset failed! Integration enabled: {position_integration_enabled}, Position: ({integrated_position_x:.3f}, {integrated_position_y:.3f}). Cannot start joystick control."
self.log_to_output(error_msg)
flight_phase = "JOYSTICK_SAFETY_ERROR"
raise Exception(error_msg)
# Initialize flight
if not DEBUG_MODE:
cf.commander.send_setpoint(0, 0, 0, 0)
time.sleep(0.1)
cf.param.set_value("commander.enHighLevel", "1")
time.sleep(0.5)
else:
self.log_to_output(
"DEBUG MODE: Skipping flight initialization for joystick control"
)
# Takeoff
flight_phase = "JOYSTICK_TAKEOFF"
start_time = time.time()
init_csv_logging(logger=self.log_to_output)
# Height sensor validation during takeoff
takeoff_height_start = current_height
height_sensor_min_change = HEIGHT_SENSOR_MIN_CHANGE
while time.time() - start_time < TAKEOFF_TIME and self.joystick_active:
# Safety check: link and sensor stale
if not check_link_safety(cf, logger=self.log_to_output):
self.joystick_active = False
break
if not DEBUG_MODE:
# Enable control corrections during takeoff if height is sufficient (> 5cm)
if use_position_hold and sensor_data_ready and current_height > 0.05:
# Hold at origin (0,0) during joystick takeoff
motion_vx, motion_vy = calculate_position_hold_corrections(0.0, 0.0)
else:
motion_vx, motion_vy = 0.0, 0.0
total_vx = TRIM_VX + motion_vy
total_vy = TRIM_VY + motion_vx
cf.commander.send_hover_setpoint(
total_vx, total_vy, 0, TARGET_HEIGHT
)
log_to_csv()
time.sleep(0.01)
# POST-TAKEOFF SAFETY CHECK: Verify height sensor worked during full takeoff period
takeoff_duration = time.time() - start_time
final_height_change = current_height - takeoff_height_start
if final_height_change < height_sensor_min_change and not DEBUG_MODE:
# Height sensor appears stuck despite full takeoff thrust period - emergency stop
emergency_msg = (
f"EMERGENCY STOP: Height sensor failure detected! "
f"Height stuck at {current_height:.3f}m (change: {final_height_change:.3f}m) "
f"after full {takeoff_duration:.1f}s takeoff to {TARGET_HEIGHT:.3f}m target. "
f"Expected >{height_sensor_min_change:.3f}m change with commanded thrust."
)
self.log_to_output(emergency_msg)
flight_phase = "JOYSTICK_EMERGENCY_HEIGHT_SENSOR"
# Emergency stop motors
cf.commander.send_setpoint(0, 0, 0, 0)
raise Exception(emergency_msg)
# Height stabilization phase - wait for drone to stabilize at target height
flight_phase = "JOYSTICK_STABILIZING"
stabilization_start = time.time()
stabilization_duration = 3.0 # 3 seconds to stabilize
# Height sensor validation during stabilization
stabilization_height_check_start = time.time()
stabilization_height_timeout = 2.0 # seconds - if height doesn't stabilize within this time, check sensor
while (
time.time() - stabilization_start < stabilization_duration
and self.joystick_active
):
# Safety check: link and sensor stale
if not check_link_safety(cf, logger=self.log_to_output):
self.joystick_active = False
break
# HEIGHT SENSOR SAFETY CHECK: Detect stuck/frozen height sensor during stabilization
stabilization_elapsed = (
time.time() - stabilization_height_check_start
)
# After 2 seconds of stabilization, check if height is reasonably close to target
if (
ENABLE_HEIGHT_SENSOR_SAFETY and stabilization_elapsed > stabilization_height_timeout
and abs(current_height - TARGET_HEIGHT)
> 0.3 # Allow 30cm tolerance
and not DEBUG_MODE
):
# Height sensor may be stuck - the drone should be at target height but isn't
emergency_msg = (
f"EMERGENCY STOP: Height sensor failure during stabilization! "
f"Height: {current_height:.3f}m, Target: {TARGET_HEIGHT:.3f}m "
f"(error: {abs(current_height - TARGET_HEIGHT):.3f}m) after {stabilization_elapsed:.1f}s. "
f"Height sensor appears stuck or inaccurate."
)
self.log_to_output(emergency_msg)
flight_phase = "JOYSTICK_EMERGENCY_HEIGHT_SENSOR_STABILIZATION"
# Emergency stop motors
cf.commander.send_setpoint(0, 0, 0, 0)
raise Exception(emergency_msg)
if use_position_hold and sensor_data_ready:
# Hold at origin (0,0) during joystick stabilization
motion_vx, motion_vy = calculate_position_hold_corrections(0.0, 0.0)
else:
motion_vx, motion_vy = 0.0, 0.0
log_to_csv()
# Apply corrections (note: axes swapped)
total_vx = TRIM_VX + motion_vy
total_vy = TRIM_VY + motion_vx
if not DEBUG_MODE:
cf.commander.send_hover_setpoint(
total_vx, total_vy, 0, TARGET_HEIGHT
)
time.sleep(CONTROL_UPDATE_RATE)
# Joystick control loop
flight_phase = "JOYSTICK_CONTROL"
# Previous time for dt calculation
last_loop_time = time.time()
# Variables for smooth key release handling and visualization
keys_were_pressed = False
key_release_time = 0.0
self._joystick_debug_counter = 0 # Reset debug counter for new session
while self.joystick_active:
# Safety check: link and sensor stale
if not check_link_safety(cf, logger=self.log_to_output):
self.joystick_active = False
break
current_time_loop = time.time()
dt = current_time_loop - last_loop_time
last_loop_time = current_time_loop
if dt > 0.1: dt = 0.1 # Cap dt to prevent jumps on lag
# 1. Get Joystick Input
sensitivity = float(self.joystick_sensitivity_var.get())
joystick_vx = 0.0
joystick_vy = 0.0
if self.joystick_keys["w"]: # Forward (positive Y)
joystick_vy += sensitivity
if self.joystick_keys["s"]: # Backward (negative Y)
joystick_vy -= sensitivity
if self.joystick_keys["a"]: # Left (positive X)
joystick_vx += sensitivity
if self.joystick_keys["d"]: # Right (negative X)
joystick_vx -= sensitivity
any_keys_pressed = any(self.joystick_keys.values())
# Check key release for visualization
if keys_were_pressed and not any_keys_pressed:
key_release_points.append((integrated_position_x, integrated_position_y))
self.log_to_output(f"Keys released - Holding target at ({target_position_x:.2f}, {target_position_y:.2f})")
keys_were_pressed = any_keys_pressed
# 2. Update Target Position (Target Integration)
if use_position_hold and sensor_data_ready:
# Move target based on joystick input (Closed-Loop Velocity Control)
if not self.joystick_hold_at_origin: # "Hold at Current" Mode (Flying Mode)
target_position_x += joystick_vx * dt
target_position_y += joystick_vy * dt
# Clamp Target to prevent integral windup if drone is stuck or lagging
dx = target_position_x - integrated_position_x
dy = target_position_y - integrated_position_y
if abs(dx) > MAX_POSITION_ERROR:
target_position_x = integrated_position_x + math.copysign(MAX_POSITION_ERROR, dx)
if abs(dy) > MAX_POSITION_ERROR:
target_position_y = integrated_position_y + math.copysign(MAX_POSITION_ERROR, dy)
else: # "Hold at Origin" Mode (Spring Mode)
target_position_x = 0.0
target_position_y = 0.0
# 3. Calculate PID Corrections (Always Active)
motion_vx, motion_vy = calculate_position_hold_corrections()
else:
motion_vx, motion_vy = 0.0, 0.0
# 4. Combine Outputs (Feedforward + Feedback)
# Feedforward: Joystick input (immediate response)
# Feedback: PID output (correction for drift/error)
# Store for CSV logging
current_correction_vx = motion_vx
current_correction_vy = motion_vy
log_to_csv()
# Apply corrections (note: axes swapped for Crazyflie coordinate system)
# Mapping: Global Y (Forward) -> Drone X (Forward) ?
# Wait, calculating 'total_vx' (Command 1) and 'total_vy' (Command 2)
# Original Code Logic Preservation:
# total_vx = TRIM + motion_vy (which was joystick_vy)
# total_vy = TRIM + motion_vx (which was joystick_vx)
# New Logic:
# We want to add Feedforward Joystick Terms to the same channels.
# If motion_vy maps to Channel 1 (VX), then joystick_vy should also map to Channel 1 (VX).
total_vx = TRIM_VX + motion_vy + joystick_vy
total_vy = TRIM_VY + motion_vx + joystick_vx
if not DEBUG_MODE:
cf.commander.send_hover_setpoint(
total_vx, total_vy, 0, TARGET_HEIGHT
)
time.sleep(CONTROL_UPDATE_RATE)
# Debug logging
if self._joystick_debug_counter % 50 == 0 and any_keys_pressed:
self.log_to_output(
f"Joy:({joystick_vx:.2f},{joystick_vy:.2f}) "
f"Tgt:({target_position_x:.2f},{target_position_y:.2f}) "
f"Pos:({integrated_position_x:.2f},{integrated_position_y:.2f})"
)
self._joystick_debug_counter += 1
# Landing when joystick control stops
flight_phase = "JOYSTICK_LANDING"
start_time = time.time()
while time.time() - start_time < LANDING_TIME and flight_active:
if not DEBUG_MODE:
cf.commander.send_hover_setpoint(TRIM_VX, TRIM_VY, 0, 0)
log_to_csv()
time.sleep(0.01)
# Stop motors
if not DEBUG_MODE:
cf.commander.send_setpoint(0, 0, 0, 0)
flight_phase = "JOYSTICK_COMPLETE"
except Exception as e:
error_msg = str(e)
flight_phase = "JOYSTICK_ERROR"
# Log the error message content to output
self.log_to_output(f"Joystick Error: {error_msg}")
finally:
# Stop logging
close_csv_logging(logger=self.log_to_output)
if log_motion:
try:
log_motion.stop()
except:
pass
if log_battery:
try:
log_battery.stop()
except:
pass
flight_active = False
maneuver_active = False
self.joystick_active = False
# Update UI in main thread
self.root.after(
0, lambda: self.start_joystick_button.config(state=tk.NORMAL)
)
# self.root.after( # Removed duplicate stop button
# 0, lambda: self.stop_joystick_button.config(state=tk.DISABLED)
# )
self.root.after(
0, lambda: self.joystick_status_var.set("Joystick: INACTIVE")
)
self.root.after(
0, lambda: self.status_var.set("Status: Joystick Control Stopped")
)
def on_key_press(self, event):
"""Handle key press events for joystick control"""
# Emergency stop with Enter or Escape key (works anytime)
if event.keysym in ("Return", "KP_Enter", "Escape"):
self.emergency_stop()
self.log_to_output(
f"EMERGENCY STOP: {event.keysym} key pressed - all systems stopped"
)
return
if not self.joystick_active:
return
key = event.char.lower()
if key in ["w", "a", "s", "d"]:
# Only process if this is a new key press (not a repeat)
if not self.key_pressed_flags[key]:
self.key_pressed_flags[key] = True
# Update joystick keys for the control thread
self.joystick_keys[key] = True
# Update joystick status to show active keys
active_keys = [k.upper() for k, v in self.joystick_keys.items() if v]
if active_keys:
self.joystick_status_var.set(
f"Joystick: ACTIVE ({','.join(active_keys)})"
)
else:
self.joystick_status_var.set("Joystick: ACTIVE")
# Log continuous movement start (only once per press)
self.log_to_output(
f"Continuous movement: {self._key_to_direction(key)} started"
)
else:
# Key is already pressed, just ensure joystick_keys is set
self.joystick_keys[key] = True
def on_key_release(self, event):
"""Handle key release events for joystick control"""
if not self.joystick_active:
return
key = event.char.lower()
if key in ["w", "a", "s", "d"]:
# Only process if this key was actually pressed
if self.key_pressed_flags[key]:
self.key_pressed_flags[key] = False
# Clear joystick keys for the control thread
self.joystick_keys[key] = False
# Update joystick status to show remaining active keys
active_keys = [k.upper() for k, v in self.joystick_keys.items() if v]
if active_keys:
self.joystick_status_var.set(
f"Joystick: ACTIVE ({','.join(active_keys)})"
)
else:
self.joystick_status_var.set("Joystick: ACTIVE")
# Log continuous movement stop with hold mode info
# Only show hold mode info when all keys are released
if not any(self.joystick_keys.values()):
mode_info = (
" - Returning to origin"
if self.joystick_hold_at_origin
else " - Holding current position"
)
self.log_to_output(
f"Continuous movement: {self._key_to_direction(key)} stopped{mode_info}"
)
else:
self.log_to_output(
f"Continuous movement: {self._key_to_direction(key)} stopped"
)
else:
# Key wasn't pressed, just ensure joystick_keys is cleared
self.joystick_keys[key] = False
def simulate_key_press(self, key):
"""Simulate a key press for joystick control (used by GUI buttons)"""
if not self.joystick_active:
return
key = key.lower()
if key in ["w", "a", "s", "d"]:
# Temporarily set the key as pressed
self.joystick_keys[key] = True
# Update status
active_keys = [k.upper() for k, v in self.joystick_keys.items() if v]
self.joystick_status_var.set(f"Joystick: ACTIVE ({','.join(active_keys)})")
# Schedule key release after a short delay (200ms)
self.root.after(200, lambda: self.simulate_key_release(key))
# Log simulated key press to output window
self.log_to_output(f"Joystick button pressed: {key.upper()}")
def simulate_key_release(self, key):
"""Simulate a key release for joystick control"""
if not self.joystick_active:
return
key = key.lower()
if key in ["w", "a", "s", "d"]:
self.joystick_keys[key] = False
# Update status
active_keys = [k.upper() for k, v in self.joystick_keys.items() if v]
if active_keys:
self.joystick_status_var.set(
f"Joystick: ACTIVE ({','.join(active_keys)})"
)
else:
self.joystick_status_var.set("Joystick: ACTIVE")
# Log simulated key release to output window
self.log_to_output(f"Joystick button released: {key.upper()}")
def main():
# Initialize CRTP drivers once at program start so GUI callbacks
# can open Crazyflie links later (required by some cflib versions).
try:
cflib.crtp.init_drivers()
print("cflib.crtp drivers initialized")
except Exception as e:
print(f"Warning: cflib.crtp.init_drivers() failed: {e}")
root = tk.Tk()
app = DeadReckoningGUI(root)
def on_closing():
global flight_active, sensor_test_active
flight_active = False
sensor_test_active = False
# Try to stop/clear NeoPixel using existing Crazyflie link if available
try:
cf = getattr(scf_instance, "cf", None)
if cf is not None:
try:
np_stop_blink(cf)
np_clear(cf)
except Exception:
pass
except Exception:
pass
root.quit()
root.destroy()
root.protocol("WM_DELETE_WINDOW", on_closing)
root.mainloop()
if __name__ == "__main__":
main()

Where is the GUI code located in the github repo ? Also this full code which you have mentioned at the end of the tutorial , do i not need anything else apart from this to run the UI ?