
KOU-III, a newly developed bipedal robot from Shandong University, It shows how engineering can bring in inspiration from human and animal movement to improve stability and mobility in robotics. They use quadrotors, small rotating mechanical systems in their design, which allow it to move effectively in complex environments. It can perform movements like walking, jumping, and balancing.
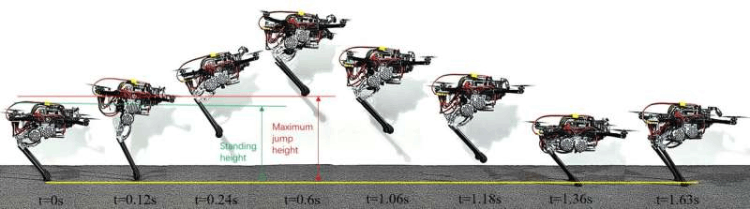
The idea of the quadrotor-assisted robot is inspired by how the ostriches use their wings to stabilize and how the humans use their hands to do sprints. By adapting these techniques into the robotics they were able to enhance the balance and mechanical stress and were able to jump higher.
This nature-inspired design, a combination of flying, jumping, and walking, gives new solutions to applications of bipedal robots in complex terrains. The advancement in bipedal robotics opens the doors to more real-world applications, such as exploring caves and clearing landmines in environments that are not suitable for humans or traditional robots. These technologies will change the way we tackle challenges in hard-to-reach and dangerous places in search-and-find rescue missions. Thus creating new opportunities for future innovations in the field of robotics and providing autonomous solutions in critical and dangerous environments.
