
Robots are the future of the world and today they are used everywhere, from a simple toy car to automobile assembly line. Even they are now used in complex surgeries, in driver less cars and as waiters in hotels. We have seen the Robots in movies which move according to the body movements like in movie Avatar and Edge of Tomorrow. So today we are sharing a Robotic Hand which will move according to the movement of our fingers. You might have seen some other Robotic Hand Project but they have used many kind of sensors and are quite expensive. But Aaron Thomen here did a great job and used a very cost effective technique to build this very cheap Robotic Hand using Arduino.
This simple Arduino based Robotic hand is very cost effective and Aaron built this using few Eye bolts, springs, bicycle chain, bearing and nuts & bolts. Servo Motors are used to move the Robotic Fingers and they both are connected using Dyneema fibre or spider wires. Servos get the instructions from Arduino according to the movement of our fingers. A Maker shield is used to interface all the servos to the Arduino.


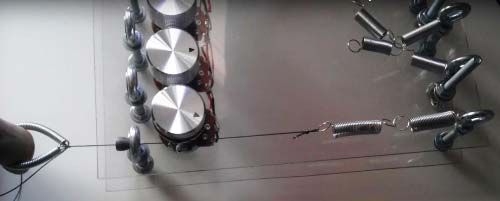
Aaron used a very good technique to build this Robotic hand. He used four potentiometers to controls the robotic hand’s fingers. Potentiometers are connected to our fingers using springs and strings as shown in the figure and the arrangement is such like that when we move our fingers, potentiometers knobs rotates. Arduino reads the rotation of these potentiometers and further sends instructions to servos in Robotic hand. There are no mechanical connections between our fingers and Robotic hand.

The whole setup, both Robotic Hand and Controller, is installed on a Lexan sheet and fixed with nuts and bolts. This Robotic arm is powered by 6 AA sized batteries. The Code for the Arduino is given on its project’s page itself. Aaron has beautifully explained the whole making process in two Videos. So go ahead and try out this cool project and build your own Robotic Hand.

very very smart yet very simple but can you provide us with the source code