

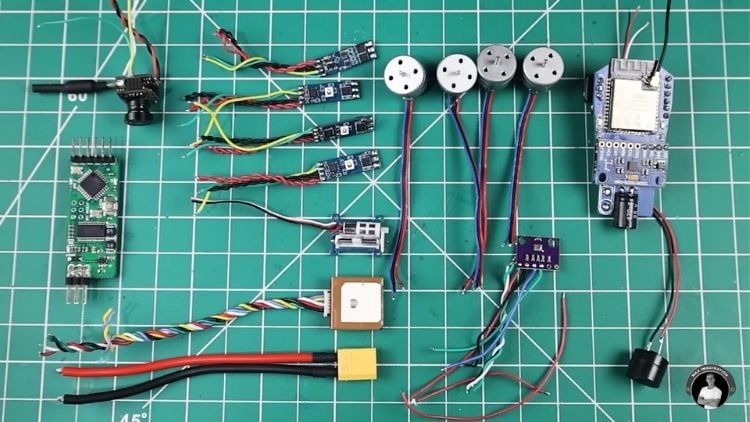
A maker recently documented the development of ESP-BLAST, a custom aerodynamic “rocket drone” designed for high-speed flight. Unlike typical quadcopters with exposed frames, this drone uses a streamlined bullet-shaped body to reduce drag while four small 1104 brushless motors drive 2.5-inch propellers. At the center of the system is an ESP32-S3, which acts as the drone’s flight controller and handles sensor data, motor control, and communication.
The hardware is built around a custom four-layer PCB designed from scratch. The board integrates an IMU for motion tracking, a barometer for altitude measurement, and a buck converter for efficient power regulation from a 3S LiPo battery. The entire frame is 3D-printed in PETG to provide better durability and heat resistance compared to PLA. Additional features include a GPS module for speed tracking and an FPV system with telemetry overlay, while a small linear servo tilts the camera upward automatically during high-speed forward flight.
On the software side, the drone runs ESP-FC, an open-source flight controller firmware compiled using PlatformIO and configured through Betaflight. After assembly, the creator conducted multiple test flights and tuned the PID parameters to eliminate yaw drift and roll oscillations during rapid acceleration. With the final tuning complete, the streamlined drone successfully reached a top speed of 108 km/h, demonstrating how custom hardware design and open-source firmware can push compact drones to impressive performance levels.
A maker built a smallest DIY ESP32 Brushless Rocket Drone and hit top speeds of 108 km/h.
