
In a remarkable fusion of robotics and machine learning, a small robot equipped with an Arduino Uno took center stage as it autonomously navigated a racetrack. The project, undertaken by an innovative creator, involved manually training the robot on simpler tracks before challenging it on a larger, more complex one. The entire journey from building the robot and designing the racetrack to data collection and processing culminated in an exhilarating final race.
The robot's construction benefited from the Open Robotic Platform (ORP) concept, allowing for easy integration of various components like motors, a breadboard, and an SD card holder. Notably, the wheels were enhanced with TPU tires to improve traction and eliminate floor scratching. The racetrack itself posed a unique challenge, initially conceived with walls and books but later improvised with cardboard boxes, demonstrating adaptability and resourcefulness.
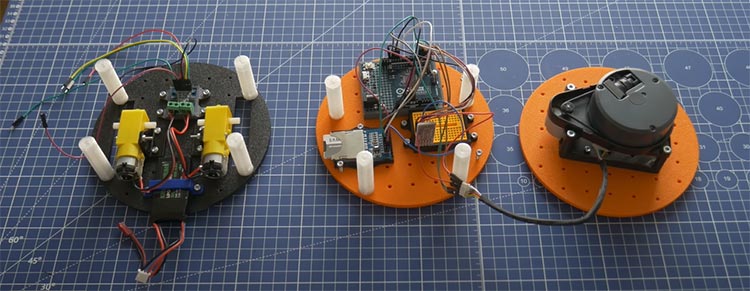
Crucial to the project was data collection, made possible through the addition of a Bluetooth module and an SD card. The creator manually controlled the robot while collecting LIDAR measurements and control labels, amassing valuable data for training. The subsequent machine learning phase involved feature selection, classification, and training, with random forests emerging as the best-performing algorithm, achieving an accuracy rate of approximately 70%.

Perhaps the most astonishing aspect of this project was the robot's ability to autonomously navigate the racetrack with just an Arduino Uno, showcasing the power of machine learning in a compact package. As the robot zipped around the course at impressive speeds, even surpassing manual control capabilities, it became evident that this project was indeed one of a kind.
