

Engineer and creator Shane Wighton has upgraded his robotic mini-golf system to tackle complex, physics-heavy shots with near-perfect accuracy. The project combines a motorized golf club with a full motion-capture setup, allowing the system to precisely track the ball, club, and course geometry. By scanning real-world mini-golf layouts into a digital model, the system can analyze terrain features like slopes, walls, and curves before taking a shot.
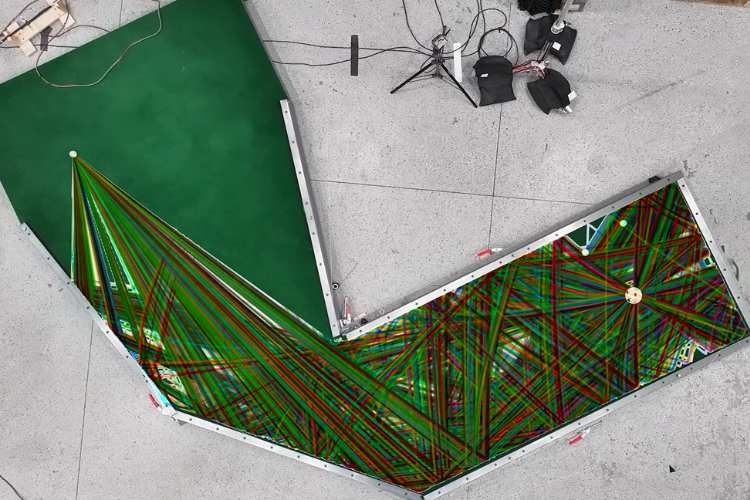
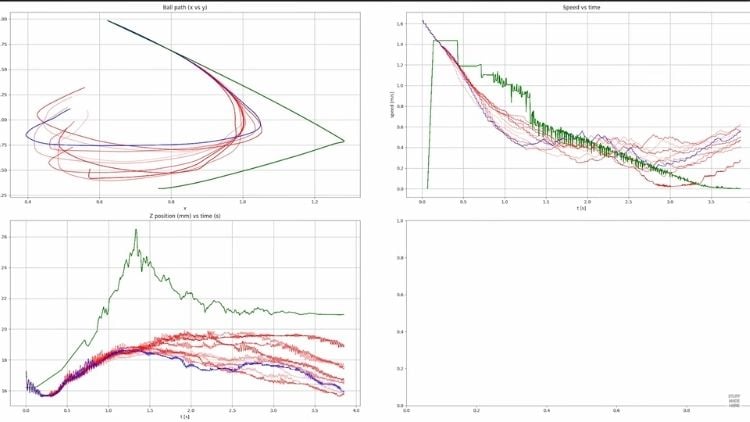
At the core of the system is a physics simulation pipeline powered by MuJoCo, which runs thousands of predictive simulations to determine the exact angle and force needed for a hole-in-one. A custom-built robotic club dynamically adjusts its strike angle mid-swing, ensuring precise execution. To create accurate course models, Shane developed a tracking wand that maps surfaces in 3D using optical markers, capturing even subtle floor variations that significantly affect ball movement.
The project also overcame several real-world engineering challenges, including flawed AI-based parameter tuning, long computation times, and even thermal expansion affecting motion tracking accuracy. By optimizing simulations and introducing real-time calibration markers, the system reduced shot calculation time to just a few minutes while maintaining precision. The result is a robotic system capable of executing highly complex shots, banking off walls, navigating uneven terrain, and even completing loop-the-loops, demonstrating how simulation, sensing, and control can merge to solve real-world physics problems.
