
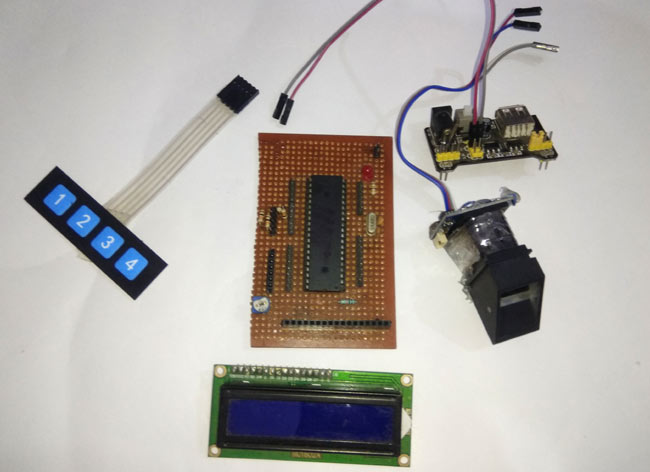
Finger Print Sensor, which we used to see in Sci-Fi movies a few years back, is now become very common to verify the identity of a person for various purposes. In present time we can see fingerprint-based systems everywhere in our daily life like for attendance in offices, employee verification in banks, for cash withdrawal or deposits in ATMs, for identity verification in government offices etc. We have already interfaced it with Arduino and with Raspberry Pi, today we are going to interface Finger Print Sensor with PIC microcontroller. Using this PIC microcontroller PIC16f877A Finger Print System, we can enroll new fingerprints in the system and can delete the already fed fingerprints. Complete working of the system has been shown in the Video given at the end of article.
Required Components
- PIC16f877A Microcontroller
- Fingerprint Module
- Push buttons or keypad
- 16x2 LCD
- 10k pot
- 18.432000 MHz Crystal Oscillator
- Bread Board or PCB (ordered from JLCPCB)
- Jumper wires
- LED (optional)
- Resistor 150 ohm -1 k ohm (optional)
- 5v Power supply
Circuit Diagram and Explanation
In this PIC Microcontroller Finger Print sensor interfacing project, we have used 4 push buttons: these buttons are used for multifunctioning. Key 1 is used for matching the finger print and increment fingerprint ID while storing or deleting the fingerprint in the system. Key 2 is used for enrolling the new fingerprint and for decrement fingerprint ID while storing or deleting fingerprint in the system. Key 3 is used for delete stored finger from the system and key 4 is used for OK. A LED is used for an indication that fingerprint is detected or matched. Here we have used a fingerprint module which works on UART. So here we have interfaced this fingerprint module with PIC microcontroller at its default baud rate which is 57600.

So, first of all, we need to make the all the required connection as shown in Circuit Diagram below. Connections are simple, we have just connected fingerprint module to PIC microcontroller’s UART. A 16x2 LCD is used for displaying all messages. A 10k pot is also used with LCD for controlling the contrast of the same. 16x2 LCD data pins are connected PORTA pins. LCD’s d4, d5, d6, and d7 pins are connected with Pin RA0, RA1, RA2, and RA3 of PIC microcontroller respectively. Four push buttons (or keypad) is connected to PORTD’s Pin RD0, RD1, RD2, and RD. LED is also connected at port PORTC’s pin RC3. Here we have used an 18.432000 MHz external crystal oscillator to clock the microcontroller.

Operation of Fingerprint Sensor with PIC Microcontroller
Operation of this project is simple, just upload hex file, generated from source code, into the PIC microcontroller with the help of PIC programmer or burner (PIckit2 or Pickit3 or others)and then you will see some intro messages over LCD and then the user will be asked to enter a choice for operations. To match fingerprint user need to press key 1 then LCD will ask for Place Finger on Finger Print Sensor. Now by putting a finger over fingerprint module, we can check whether our fingerprints are already stored or not. If your fingerprint is stored then LCD will show the message with the storing ID of fingerprint-like ‘ID:2’ otherwise it will show ‘Not Found’.
Now to enroll a finger Print, the user needs to press enroll button or key 2 and follow the instructions messages on the LCD screen.
If the user wants to delete any of fingerprints then the user needs to press the delete button or key 3. After which, LCD will ask for the ID of the fingerprint which is to be deleted. Now by using increment push button or key 1(match push button or key 1) and decrement push button or key 2 (enroll push button or key 2) for increment and decrement, the user can select the ID of saved Finger Print and press OK button to delete that fingerprint. For more understanding have a look at the video given at the end of the project.

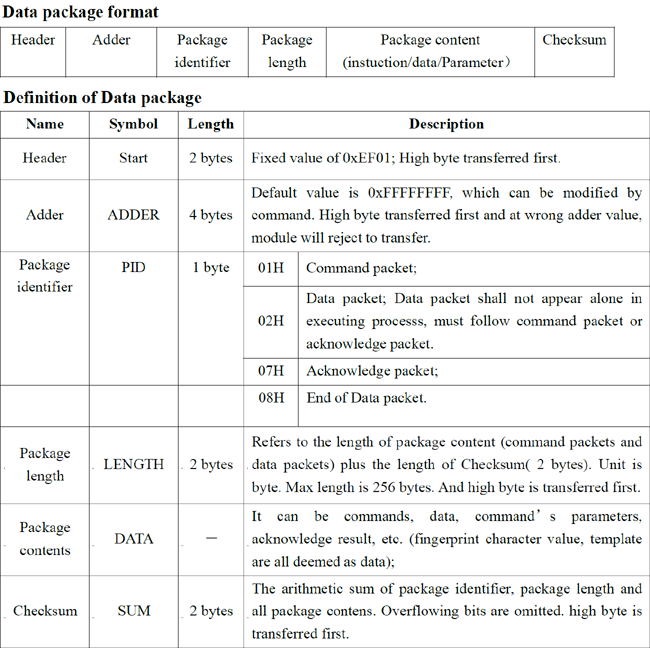
FingerPrint interfacing Note: Program of this project is a little bit complex for a beginner. But its simple interfacing code made by using reading r305 fingerprint module datasheet. All the instruction of functioning of this fingerprint module is given in the datasheet.
Here we have used a frame format to talk with fingerprint module. Whenever we send a command or data request frame to fingerprint module it responds us with the same frame format containing data or information related to applied command. All of the data and command frame format has been given in the user manual or in the datasheet of R305 fingerprint module.
Programming Explanation
In programming, we have used the below frame format.
We begin the program by setting the configuration bits and defining macros and pins for LCD, Buttons and LED, which you can check in the complete code given at the end of this project. If you are new to PIC Microcontroller then start with Getting started with PIC Microcontroller Project.
Then we declared and initialized some variable and array, and made a frame that we need to use in this project to interface fingerprint module with PIC microcontroller.
uchar buf[20];
uchar buf1[20];
volatile uint index=0;
volatile int flag=0;
uint msCount=0;
uint g_timerflag=1;
volatile uint count=0;
uchar data[10];
uint id=1;
enum
{
CMD,
DATA,
SBIT_CREN=4,
SBIT_TXEN,
SBIT_SPEN,
};
const char passPack[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x7, 0x13, 0x0, 0x0, 0x0, 0x0, 0x0, 0x1B};
const char f_detect[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x3, 0x1, 0x0, 0x5};
const char f_imz2ch1[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x4, 0x2, 0x1, 0x0, 0x8};
const char f_imz2ch2[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x4, 0x2, 0x2, 0x0, 0x9};
const char f_createModel[]={0xEF,0x1,0xFF,0xFF,0xFF,0xFF,0x1,0x0,0x3,0x5,0x0,0x9};
char f_storeModel[]={0xEF,0x1,0xFF,0xFF,0xFF,0xFF,0x1,0x0,0x6,0x6,0x1,0x0,0x1,0x0,0xE};
const char f_search[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x8, 0x1B, 0x1, 0x0, 0x0, 0x0, 0xA3, 0x0, 0xC8};
char f_delete[]={0xEF,0x1,0xFF,0xFF,0xFF,0xFF,0x1,0x0,0x7,0xC,0x0,0x0,0x0,0x1,0x0,0x15};
After it, we have made LCD function to drive LCD.
void lcdwrite(uchar ch,uchar rw)
{
LCDPORT= ch>>4 & 0x0F;
RS=rw;
EN=1;
__delay_ms(5);
EN=0;
LCDPORT= ch & 0x0F;
EN=1;
__delay_ms(5);
EN=0;
}
lcdprint(char *str)
{
while(*str)
{
lcdwrite(*str++,DATA);
//__delay_ms(20);
}
}
lcdbegin()
{
uchar lcdcmd[5]={0x02,0x28,0x0E,0x06,0x01};
uint i=0;
for(i=0;i<5;i++)
lcdwrite(lcdcmd[i], CMD);
}
Given function is used for initializing UART
void serialbegin(uint baudrate)
{
SPBRG = (18432000UL/(long)(64UL*baudrate))-1; // baud rate @18.432000Mhz Clock
TXSTAbits.SYNC = 0; //Setting Asynchronous Mode, ie UART
RCSTAbits.SPEN = 1; //Enables Serial Port
TRISC7 = 1; //As Prescribed in Datasheet
TRISC6 = 0; //As Prescribed in Datasheet
RCSTAbits.CREN = 1; //Enables Continuous Reception
TXSTAbits.TXEN = 1; //Enables Transmission
GIE = 1; // ENABLE interrupts
INTCONbits.PEIE = 1; // ENable peripheral interrupts.
PIE1bits.RCIE = 1; // ENABLE USART receive interrupt
PIE1bits.TXIE = 0; // disable USART TX interrupt
PIR1bits.RCIF = 0;
}
Given functions are used for transferring commands to fingerprint Module and receiving data from fingerprint module.
void serialwrite(char ch)
{
while(TXIF==0); // Wait till the transmitter register becomes empty
TXIF=0; // Clear transmitter flag
TXREG=ch; // load the char to be transmitted into transmit reg
}
serialprint(char *str)
{
while(*str)
{
serialwrite(*str++);
}
}
void interrupt SerialRxPinInterrupt(void)
{
if((PIR1bits.RCIF == 1) && (PIE1bits.RCIE == 1))
{
uchar ch=RCREG;
buf[index++]=ch;
if(index>0)
flag=1;
RCIF = 0; // clear rx flag
}
}
void serialFlush()
{
for(int i=0;i<sizeof(buf);i++)
{
buf[i]=0;
}
}
After it we need to make a function which prepares data that is to be transmitted to fingerprint and decode the data coming from fingerprint module.
int sendcmd2fp(char *pack, int len)
{
uint res=ERROR;
serialFlush();
index=0;
__delay_ms(100);
for(int i=0;i<len;i++)
{
serialwrite(*(pack+i));
}
__delay_ms(1000);
if(flag == 1)
{
if(buf[0] == 0xEF && buf[1] == 0x01)
{
if(buf[6] == 0x07) // ack
{
if(buf[9] == 0)
{
uint data_len= buf[7];
data_len<<=8;
data_len|=buf[8];
for(int i=0;i<data_len;i++)
data[i]=0;
for(int i=0;i<data_len-2;i++)
{
data[i]=buf[10+i];
}
res=PASS;
}
else
{
res=ERROR;
}
}
}
Now, there are four function available in the code for four different task:
- Function for input the fingerprint ID – unit getId()
- Function for matching finger – void matchFinger()
- Function for enrolling new finger – void enrolFinger()
- Function for deleting a finger – void deleteFinger()
The complete code with all the four function is given at the end.
Now in the main function, we initialize GPIOs, LCD, UART and check whether the fingerprint module is connected with a microcontroller or not. Then it shows some intro messages over LCD. Finally in while loop we read all keys or push buttons to operate the project.
int main()
{
void (*FP)();
ADCON1=0b00000110;
LEDdir= 0;
SWPORTdir=0xF0;
SWPORT=0x0F;
serialbegin(57600);
LCDPORTDIR=0x00;
TRISE=0;
lcdbegin();
lcdprint("Fingerprint");
lcdwrite(192,CMD);
lcdprint("Interfacing");
__delay_ms(2000);
lcdwrite(1,CMD);
lcdprint("Using PIC16F877A");
lcdwrite(192,CMD);
lcdprint("Circuit Digest");
__delay_ms(2000);
index=0;
while(sendcmd2fp(&passPack[0],sizeof(passPack)))
{
lcdwrite(1,CMD);
lcdprint("FP Not Found");
__delay_ms(2000);
index=0;
}
lcdwrite(1,CMD);
lcdprint("FP Found");
__delay_ms(1000);
lcdinst();
while(1)
{
FP=match<enrol?matchFinger:enrol<delet?enrolFinger:delet<enrol?deleteFinger:lcdinst;
FP();
}
return 0;
}
Complete PIC Code and a Working Video is given below. Also check our other projects using Finger Print Sensor Module:
Complete Project Code
#define _XTAL_FREQ 18432000
#include <xc.h>
#include<pic.h>
#include <stdio.h>
#include <stdlib.h>
// BEGIN CONFIG
#pragma config FOSC = HS // Oscillator Selection bits (HS oscillator)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT enabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled)
#pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
//END CONFIG
#define uchar unsigned char
#define uint unsigned int
#define LCDPORTDIR TRISA
#define LCDPORT PORTA
#define RS RE1
#define EN RE0
#define SWPORTdir TRISD
#define SWPORT PORTD
#define enrol RD4
#define match RD5
#define delet RD7
#define ok RD6
#define up RD5
#define down RD4
#define LEDdir TRISC3
#define LED RC3
#define HIGH 1
#define LOW 0
#define PASS 0
#define ERROR 1
#define checkKey(id) id=up<down?++id:down<up?--id:id;
uchar buf[20];
uchar buf1[20];
volatile uint index=0;
volatile int flag=0;
uint msCount=0;
uint g_timerflag=1;
volatile uint count=0;
uchar data[10];
uint id=1;
enum
{
CMD,
DATA,
SBIT_CREN=4,
SBIT_TXEN,
SBIT_SPEN,
};
const char passPack[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x7, 0x13, 0x0, 0x0, 0x0, 0x0, 0x0, 0x1B};
const char f_detect[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x3, 0x1, 0x0, 0x5};
const char f_imz2ch1[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x4, 0x2, 0x1, 0x0, 0x8};
const char f_imz2ch2[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x4, 0x2, 0x2, 0x0, 0x9};
const char f_createModel[]={0xEF,0x1,0xFF,0xFF,0xFF,0xFF,0x1,0x0,0x3,0x5,0x0,0x9};
char f_storeModel[]={0xEF,0x1,0xFF,0xFF,0xFF,0xFF,0x1,0x0,0x6,0x6,0x1,0x0,0x1,0x0,0xE};
const char f_search[]={0xEF, 0x1, 0xFF, 0xFF, 0xFF, 0xFF, 0x1, 0x0, 0x8, 0x1B, 0x1, 0x0, 0x0, 0x0, 0xA3, 0x0, 0xC8};
char f_delete[]={0xEF,0x1,0xFF,0xFF,0xFF,0xFF,0x1,0x0,0x7,0xC,0x0,0x0,0x0,0x1,0x0,0x15};
void lcdwrite(uchar ch,uchar rw)
{
LCDPORT= ch>>4 & 0x0F;
RS=rw;
EN=1;
__delay_ms(5);
EN=0;
LCDPORT= ch & 0x0F;
EN=1;
__delay_ms(5);
EN=0;
}
lcdprint(char *str)
{
while(*str)
{
lcdwrite(*str++,DATA);
//__delay_ms(20);
}
}
lcdbegin()
{
uchar lcdcmd[5]={0x02,0x28,0x0E,0x06,0x01};
uint i=0;
for(i=0;i<5;i++)
lcdwrite(lcdcmd[i], CMD);
}
void lcdinst()
{
lcdwrite(0x80, CMD);
lcdprint("1-Match 2-Enroll");
lcdwrite(0xc0, CMD);
lcdprint("3-delete Finger");
__delay_ms(10);
}
void serialbegin(uint baudrate)
{
SPBRG = (18432000UL/(long)(64UL*baudrate))-1; // baud rate @18.432000Mhz Clock
TXSTAbits.SYNC = 0; //Setting Asynchronous Mode, ie UART
RCSTAbits.SPEN = 1; //Enables Serial Port
TRISC7 = 1; //As Prescribed in Datasheet
TRISC6 = 0; //As Prescribed in Datasheet
RCSTAbits.CREN = 1; //Enables Continuous Reception
TXSTAbits.TXEN = 1; //Enables Transmission
GIE = 1; // ENABLE interrupts
INTCONbits.PEIE = 1; // ENable peripheral interrupts.
PIE1bits.RCIE = 1; // ENABLE USART receive interrupt
PIE1bits.TXIE = 0; // disable USART TX interrupt
PIR1bits.RCIF = 0;
}
void serialwrite(char ch)
{
while(TXIF==0); // Wait till the transmitter register becomes empty
TXIF=0; // Clear transmitter flag
TXREG=ch; // load the char to be transmitted into transmit reg
}
serialprint(char *str)
{
while(*str)
{
serialwrite(*str++);
}
}
void interrupt SerialRxPinInterrupt(void)
{
if((PIR1bits.RCIF == 1) && (PIE1bits.RCIE == 1))
{
uchar ch=RCREG;
buf[index++]=ch;
if(index>0)
flag=1;
RCIF = 0; // clear rx flag
}
}
void serialFlush()
{
for(int i=0;i<sizeof(buf);i++)
{
buf[i]=0;
}
}
int sendcmd2fp(char *pack, int len)
{
uint res=ERROR;
serialFlush();
index=0;
__delay_ms(100);
for(int i=0;i<len;i++)
{
serialwrite(*(pack+i));
}
__delay_ms(1000);
if(flag == 1)
{
if(buf[0] == 0xEF && buf[1] == 0x01)
{
if(buf[6] == 0x07) // ack
{
if(buf[9] == 0)
{
uint data_len= buf[7];
data_len<<=8;
data_len|=buf[8];
for(int i=0;i<data_len;i++)
data[i]=0;
for(int i=0;i<data_len-2;i++)
{
data[i]=buf[10+i];
}
res=PASS;
}
else
{
res=ERROR;
}
}
}
index=0;
flag=0;
return res;
}
}
uint getId()
{
uint id=0;
lcdwrite(1, CMD);
while(1)
{
lcdwrite(0x80, CMD);
checkKey(id);
sprintf(buf1,"Enter Id:%d ",id);
lcdprint(buf1);
__delay_ms(200);
if(ok == LOW)
return id;
}
}
void matchFinger()
{
lcdwrite(1,CMD);
lcdprint("Place Finger");
lcdwrite(192,CMD);
__delay_ms(2000);
if(!sendcmd2fp(&f_detect[0],sizeof(f_detect)))
{
if(!sendcmd2fp(&f_imz2ch1[0],sizeof(f_imz2ch1)))
{
if(!sendcmd2fp(&f_search[0],sizeof(f_search)))
{
lcdwrite(1,CMD);
lcdprint("Finger Found");
uint id= data[0];
id<<=8;
id+=data[1];
uint score=data[2];
score<<=8;
score+=data[3];
sprintf(buf1,"Id:%d Score:%d",id,score);
lcdwrite(192,CMD);
lcdprint(buf1);
LED=1;
__delay_ms(1000);
LED=0;
}
else
{
lcdwrite(1,CMD);
lcdprint("Not Found");
}
}
}
else
{
lcdprint("No Finger");
}
__delay_ms(2000);
}
void enrolFinger()
{
lcdwrite(1,CMD);
lcdprint("Enroll Finger");
__delay_ms(2000);
lcdwrite(1,CMD);
lcdprint("Place Finger");
lcdwrite(192,CMD);
__delay_ms(1000);
if(!sendcmd2fp(&f_detect[0],sizeof(f_detect)))
{
if(!sendcmd2fp(&f_imz2ch1[0],sizeof(f_imz2ch1)))
{
lcdprint("Finger Detected");
__delay_ms(1000);
lcdwrite(1,CMD);
lcdprint("Place Finger");
lcdwrite(192,CMD);
lcdprint(" Again ");
__delay_ms(2000);
if(!sendcmd2fp(&f_detect[0],sizeof(f_detect)))
{
if(!sendcmd2fp(&f_imz2ch2[0],sizeof(f_imz2ch2)))
{
lcdwrite(1,CMD);
lcdprint("Finger Detected");
__delay_ms(1000);
if(!sendcmd2fp(&f_createModel[0],sizeof(f_createModel)))
{
id=getId();
f_storeModel[11]= (id>>8) & 0xff;
f_storeModel[12]= id & 0xff;
f_storeModel[14]= 14+id;
if(!sendcmd2fp(&f_storeModel[0],sizeof(f_storeModel)))
{
lcdwrite(1,CMD);
lcdprint("Finger Stored");
sprintf(buf1,"Id:%d",id);
lcdwrite(192,CMD);
lcdprint(buf1);
__delay_ms(1000);
}
else
{
lcdwrite(1,CMD);
lcdprint("Finger Not Stored");
}
}
else
lcdprint("Error");
}
else
lcdprint("Error");
}
else
lcdprint("No Finger");
}
}
else
{
lcdprint("No Finger");
}
__delay_ms(2000);
}
void deleteFinger()
{
id=getId();
f_delete[10]=id>>8 & 0xff;
f_delete[11]=id & 0xff;
f_delete[14]=(21+id)>>8 & 0xff;
f_delete[15]=(21+id) & 0xff;
if(!sendcmd2fp(&f_delete[0],sizeof(f_delete)))
{
lcdwrite(1,CMD);
sprintf(buf1,"Finger ID %d ",id);
lcdprint(buf1);
lcdwrite(192, CMD);
lcdprint("Deleted Success");
}
else
{
lcdwrite(1,CMD);
lcdprint("Error");
}
__delay_ms(2000);
}
int main()
{
void (*FP)();
ADCON1=0b00000110;
LEDdir= 0;
SWPORTdir=0xF0;
SWPORT=0x0F;
serialbegin(57600);
LCDPORTDIR=0x00;
TRISE=0;
lcdbegin();
lcdprint("Fingerprint");
lcdwrite(192,CMD);
lcdprint("Interfacing");
__delay_ms(2000);
lcdwrite(1,CMD);
lcdprint("Using PIC16F877A");
lcdwrite(192,CMD);
lcdprint("Circuit Digest");
__delay_ms(2000);
index=0;
while(sendcmd2fp(&passPack[0],sizeof(passPack)))
{
lcdwrite(1,CMD);
lcdprint("FP Not Found");
__delay_ms(2000);
index=0;
}
lcdwrite(1,CMD);
lcdprint("FP Found");
__delay_ms(1000);
lcdinst();
while(1)
{
FP=match<enrol?matchFinger:enrol<delet?enrolFinger:delet<enrol?deleteFinger:lcdinst;
FP();
}
return 0;
}
Comments
when I copy the code in mplab xide xc8 the bellow message is coming. How can I solve this problem
CLEAN SUCCESSFUL (total time: 3ms)
make -f nbproject/Makefile-default.mk SUBPROJECTS= .build-conf
make[1]: Entering directory 'C:/Users/ABDULLAH/MPLABXProjects/Finger/Finger.X'
make -f nbproject/Makefile-default.mk dist/default/production/Finger.X.production.hex
make[2]: Entering directory 'C:/Users/ABDULLAH/MPLABXProjects/Finger/Finger.X'
"C:\Program Files\Microchip\xc8\v2.00\bin\xc8-cc.exe" -mcpu=16F877A -c -fno-short-double -fno-short-float -O0 -fasmfile -maddrqual=ignore -xassembler-with-cpp -Wa,-a -DXPRJ_default=default -msummary=-psect,-class,+mem,-hex,-file -ginhx032 -Wl,--data-init -mno-keep-startup -mno-osccal -mno-resetbits -mno-save-resetbits -mno-download -mno-stackcall -std=c99 -gdwarf-3 -mstack=compiled:auto:auto -o build/default/production/Finger.p1 Finger.c
::: advisory: (2049) C99 compliant libraries are currently not available for baseline or mid-range devices, or for enhanced mid-range devices using a reentrant stack; using C90 libraries
Finger.c:92:1: warning: type specifier missing, defaults to 'int' [-Wimplicit-int]
lcdprint(char *str)
^
Finger.c:99:1: warning: control reaches end of non-void function [-Wreturn-type]
}
^
Finger.c:101:1: warning: type specifier missing, defaults to 'int' [-Wimplicit-int]
lcdbegin()
^
Finger.c:107:1: warning: control reaches end of non-void function [-Wreturn-type]
}
^
Finger.c:144:1: warning: type specifier missing, defaults to 'int' [-Wimplicit-int]
serialprint(char *str)
^
Finger.c:150:1: warning: control reaches end of non-void function [-Wreturn-type]
}
^
Finger.c:152:6: error: variable has incomplete type 'void'
void interrupt SerialRxPinInterrupt(void)
^
Finger.c:152:15: error: expected ';' after top level declarator
void interrupt SerialRxPinInterrupt(void)
^
;
6 warnings and 2 errors generated.
(908) exit status = 1
nbproject/Makefile-default.mk:105: recipe for target 'build/default/production/Finger.p1' failed
make[2]: Leaving directory 'C:/Users/ABDULLAH/MPLABXProjects/Finger/Finger.X'
nbproject/Makefile-default.mk:90: recipe for target '.build-conf' failed
make[1]: Leaving directory 'C:/Users/ABDULLAH/MPLABXProjects/Finger/Finger.X'
nbproject/Makefile-impl.mk:39: recipe for target '.build-impl' failed
make[2]: *** [build/default/production/Finger.p1] Error 1
make[1]: *** [.build-conf] Error 2
make: *** [.build-impl] Error 2
BUILD FAILED (exit value 2, total time: 7s)
Finger.c:152:15: error: expected ';' after top level declarator
void interrupt SerialRxPinInterrupt(void)
Your error is here, you have missed a semi-colon somewhere
Hello guys ... Please help me i am using r307 with Rpi4 with QT in C++..., i sent first passPack buffer , i received 0xFF , 0X01, 0XFF ,0XFF,0XFF,0XFF,0X07,0X00,0X03,0X00,0X00
Means its detected or not..?
And every time i send different command , i received in last 0x03,0x00,0x00
And i am not understand , why every time every command send with index 0 , why...?
Hello! What was the solution? I have the same issue unfortunately... :(
What is the correct code?
And fingerprint module doesn't need a grounding?
Thanks in advance
Thank you very much for your above answer
Please Sir if you can provide the Proteus Schematic and mplab xc8 code file , I hope you attach these files in this project, because it will be very helpfully.
what is the model of the fingerprint sensor you used?...as far i saw fingerprint sensor comes with 6 wires...but your's is 4....
and by which software i will make hax file?
hello thank you very much for your projects have helped me a lot. I have a problem with the sensor, I am using the as606 but it does not recognize you, how can I solve this problem? thanks
hello sir ,
i am using the stm8s207mb controller . while enrolling the finger its showing the figer stored with id number what i entered , agin i amgoing to match the figer its showing the figer detected with id 0 and score also 0, its not showing proper id what i saved. and aslo not blinkin the led in fingerprint module
Does anyone have the correct code for this? without the errors
Really a good job. There are different and interesting solutions to improve my coding. I have already tried
on PIC18F4550 and PIC16F887 and works very well.
I'm just confused on the password that by default is FF,FF,FF,FF but in your code in 00,00,00,00. Why pw equal to zero works?
I wonder if this code is portable for fingerprint model R503...
Thanks for sharing your expertise in coding anyway
Debug build of project `C:\Users\K\Desktop\RELOJ\LECTOR DE HELLA.mcp' started.
Language tool versions: MPASMWIN.exe v5.50, mplink.exe v4.48, mplib.exe v4.48
Preprocessor symbol `__DEBUG' is defined.
Thu Feb 10 10:18:31 2022
----------------------------------------------------------------------
Make: The target "C:\Users\K\Desktop\RELOJ\lector de huella.o" is out of date.
Executing: "C:\Program Files (x86)\Microchip\MPASM Suite\MPASMWIN.exe" /q /p16F877A "lector de huella.asm" /l"lector de huella.lst" /e"lector de huella.err" /o"lector de huella.o" /d__DEBUG=1
Error[105] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 2 : Cannot open file (Include File "xc.h" not found)
Error[105] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 3 : Cannot open file (Include File "pic.h" not found)
Error[105] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 4 : Cannot open file (Include File "stdio.h" not found)
Error[105] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 5 : Cannot open file (Include File "stdlib.h" not found)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 6 : Illegal character (/)
Error[121] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 7 : Illegal label (#pragma)
Error[176] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 7 : CONFIG Directive Error: (processor "16F877A" is invalid for CONFIG directive)
Error[121] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 8 : Illegal label (#pragma)
Error[176] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 8 : CONFIG Directive Error: (processor "16F877A" is invalid for CONFIG directive)
Error[121] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 9 : Illegal label (#pragma)
Error[176] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 9 : CONFIG Directive Error: (processor "16F877A" is invalid for CONFIG directive)
Error[121] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 10 : Illegal label (#pragma)
Error[176] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 10 : CONFIG Directive Error: (processor "16F877A" is invalid for CONFIG directive)
Error[121] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 11 : Illegal label (#pragma)
Error[176] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 11 : CONFIG Directive Error: (processor "16F877A" is invalid for CONFIG directive)
Error[121] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 12 : Illegal label (#pragma)
Error[176] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 12 : CONFIG Directive Error: (processor "16F877A" is invalid for CONFIG directive)
Error[121] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 13 : Illegal label (#pragma)
Error[176] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 13 : CONFIG Directive Error: (processor "16F877A" is invalid for CONFIG directive)
Error[121] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 14 : Illegal label (#pragma)
Error[176] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 14 : CONFIG Directive Error: (processor "16F877A" is invalid for CONFIG directive)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 15 : Illegal character (/)
Error[121] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 32 : Illegal label (HIGH)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 37 : Illegal opcode (char)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 38 : Illegal opcode (char)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 39 : Illegal opcode (unsigned)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 40 : Illegal opcode (int)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 41 : Illegal opcode (int)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 42 : Illegal opcode (int)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 43 : Illegal opcode (unsigned)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 44 : Illegal opcode (char)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 45 : Illegal opcode (int)
Error[150] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 46 : Labels must be defined in a code or data section when making an object file
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 47 : Illegal character ({)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 48 : Found label after column 1. (CMD)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 48 : Illegal character (,)
Error[152] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 49 : Executable code and data must be defined in an appropriate section
Warning[210] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 49 : Extra ","
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 50 : Found label after column 1. (SBIT_CREN)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 50 : Illegal character (,)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 51 : Found label after column 1. (SBIT_TXEN)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 51 : Illegal character (,)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 52 : Found label after column 1. (SBIT_SPEN)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 52 : Illegal character (,)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 53 : Illegal character (})
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 54 : Illegal opcode (char)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 55 : Illegal opcode (char)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 56 : Illegal opcode (char)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 57 : Illegal opcode (char)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 58 : Illegal opcode (char)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 59 : Illegal opcode (f_storeModel)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 60 : Illegal opcode (char)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 61 : Illegal opcode (f_delete)
Error[122] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 62 : Illegal opcode (lcdwrite)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 63 : Illegal character ({)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 64 : Found label after column 1. (PORTA)
Error[113] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 64 : Symbol not previously defined (ch)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 65 : Found label after column 1. (RE1)
Error[113] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 65 : Symbol not previously defined (rw)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 66 : Found label after column 1. (RE0)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 67 : Found label after column 1. (__delay_ms)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 67 : Illegal character (()
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 68 : Found label after column 1. (RE0)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 69 : Found label after column 1. (PORTA)
Error[113] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 69 : Symbol not previously defined (ch)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 70 : Found label after column 1. (RE0)
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 71 : Found label after column 1. (__delay_ms)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 71 : Illegal character (()
Warning[207] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 72 : Found label after column 1. (RE0)
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 73 : Illegal character (})
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 74 : Illegal character (()
Error[108] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 75 : Illegal character ({)
Error[139] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 177 : Maximum of 100 lines inside WHILE-ENDW
Error[129] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 371 : Expected (ENDW)
Error[129] C:\USERS\K\DESKTOP\RELOJ\LECTOR DE HUELLA.ASM 372 : Expected (END)
Halting build on first failure as requested.
----------------------------------------------------------------------
Debug build of project `C:\Users\K\Desktop\RELOJ\LECTOR DE HELLA.mcp' failed.
Language tool versions: MPASMWIN.exe v5.50, mplink.exe v4.48, mplib.exe v4.48
Preprocessor symbol `__DEBUG' is defined.
Thu Feb 10 10:18:37 2022
----------------------------------------------------------------------
BUILD FAILED
help mi pleace

please help me to convert the above code to be able to use in mplab xc8, because when I use as it is will be errors and the build failed.
so I want the code that work in mplab xc8 without coming of any error