
At a recent community webinar focused on building robotics companies in India, Raghvendra Sutar, founder of Kikobot, discussed how he started the company, the products it has developed, the challenges of manufacturing robotics hardware, and the company’s plans to expand into industrial robotics.
Raghvendra said Kikobot was started in mid-2024 with an initial goal of addressing a specific gap in robotics education. According to him, many students interested in robotics wanted hands-on experience but did not have access to suitable hardware for learning robotics concepts such as kinematics, AI/ML applications, and practical robot operation.
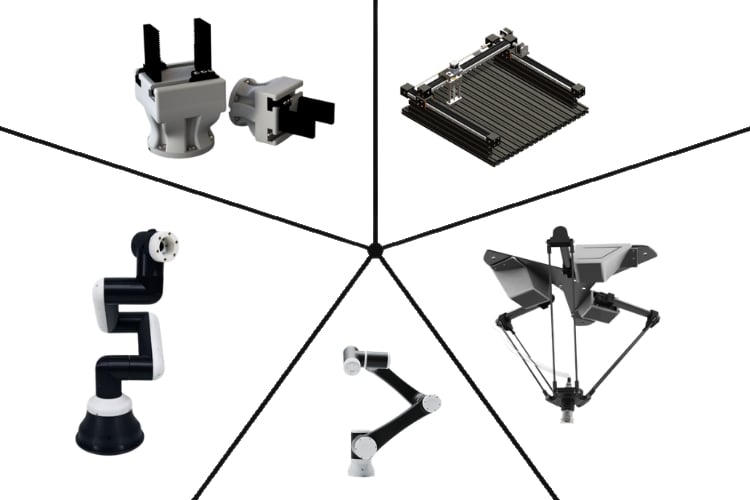
To address that, Kikobot began by building smaller robotic systems for educational and research use. Raghvendra said the company developed delta robots, its C1 six-degree-of-freedom robotic arm, and other robotics platforms aimed at universities and students. He said these products were sold to universities, including IIT students, and that the company is now moving toward industrial-grade systems, including six-axis collaborative robots, delta robots, and gantry systems. He described Kikobot as a robot manufacturer based in Pune.

From Graduation to Company Formation
Raghvendra said he completed his graduation in 2024 and started the company shortly afterwards. Prior to that, he said his experience was limited to research internships.
He traced the company’s origin to a problem he observed during his final year of graduation. In schools, colleges, and universities, including his own, he said access to robotics hardware was limited, often centered around a single industrial robotic arm used for demonstrations or limited practical work. He also said he did not see an Indian company building standard robotics hardware specifically for students to learn programming, ROS, AI, and robotics engineering through practical use.
That observation led him to begin building robotics products for education.
Early Development and First Prototype
Raghvendra said he was incubated in a venture studio in 2024, which supported initial funding and enabled him to focus on product development, sales, and marketing. Using that support, he built early prototypes using 3D printing and sourced hardware components for manufacturing and design.
He said development began in May 2024, and Kikobot’s first prototype was ready by the end of July. Rather than spending years on R&D before launch, Raghvendra said the company showcased the prototype at automation expos to understand market demand and customer needs.
He described this market exposure as useful for analyzing what customers actually wanted.
Product Development Through Continuous Iteration
According to Raghvendra, Kikobot’s original design has remained largely consistent, but the company continuously improves its robots based on customer feedback, feature requests, and failures encountered during use.
He said Kikobot did not wait to fully mature the product before selling it. Instead, customers received early versions, and the company iterated based on direct usage feedback.
Raghvendra emphasized that founders should hand products to real users early rather than over-refining them internally, describing that as the “real check” for a product.
First Sale and Early Customers
Raghvendra said Kikobot’s first sale happened through personal contacts rather than formal marketing. He specifically recalled the date as November 21, 2024.
He said the first customer was from IIT Bhilai, where the robot was purchased for a project.
Core Technical Challenge: Making the Math Work on Hardware
When discussing technical challenges, Raghvendra said the most difficult part of building the first robotic arm was not electronics sourcing, but solving robotic control problems in practice.
He identified kinematics and mathematical solvers as the main challenge, noting that academic coursework teaches how to solve equations, but making those systems work reliably on real hardware is different.
He described that as the most difficult early engineering problem Kikobot faced.
Product Lineup and Sales
Raghvendra said Kikobot currently has:
- Two collaborative robots in its research and education lineup
- Two delta robot variants
- Gantry systems
- Multiple grippers
- A total of six to seven SKUs in education and research robotics
- Two industrial robotics systems under development, including six-axis cobots and delta robots
He also said Kikobot sold more than 40 units of its educational robots, including the C1 and C2 Rover series, in 2025 to institutes and companies.
Separately, he said that after officially starting sales in January 2025, Kikobot initially sold around 12 robots per month and is now selling around 3–4 robots per month.
Educational Robotics as a Path to Industrial Robotics
Raghvendra said Kikobot’s primary long-term focus is industrial robotics, but the company began with educational robots to gain practical experience.
He explained that the core robotics principles, particularly kinematics and control, remain fundamentally the same whether the robot is small or industrial-scale. According to him, scaling mainly involves hardware maturity, added features, and improved reliability.
For industrial systems, he said, reliability is the primary requirement: robots must run continuously, with strong control systems and without hardware, firmware, or controller failures.
C1 Robot Specifications
Raghvendra shared several specifications for Kikobot’s C1 robot:
- Payload: 200–250 grams
- Reach: 300 mm
- Six-axis robotic arm design
- Available in three controller variants
He said the controller options include:
- ESP32 variant, intended for programming and micro-ROS learning
- Support for MoveIt and ROS control
- Kikobot’s own controller software for industrial-style jogging, speed control, and point programming
- Raspberry Pi variant
- Jetson Orin Nano variant for AI and vision-related development
Selling Strategy
Initially, Kikobot tried working through partners such as EdTech companies and robotics learning centers, but Raghvendra said proving the product through those channels was difficult in the beginning.
As a result, Kikobot shifted to direct sales, built its own online store, and later listed products on external robotics platforms.
He said both direct selling and distributor channels are useful.
Applications of Kikobot Robots
Raghvendra described several use cases for Kikobot robots in academia and industry.
He said students use them in projects, including one IIT project where a robotic arm was mounted on an autonomous mobile robot for autonomous pick-and-place tasks.

He also said users apply the robots for teleoperation, imitation learning, and robotics experiments using supported software libraries.
In industrial settings, he said system integrators use Kikobot robots for proof-of-concept work before securing larger automation contracts.
Manufacturing Challenges
Raghvendra said scaling hardware production created significant challenges.
He described instances where robots shipped to customers failed or broke, calling that difficult news for a startup. In response, he said Kikobot focused on continuous customer support.
On manufacturing methods, he said Kikobot initially shipped robots with 3D-printed bodies. However, he said the company has now transitioned to vacuum-cast V2 robots.
He explained that injection molding was too expensive for small production batches, while 3D printing had limitations. Vacuum casting became Kikobot’s chosen manufacturing method, and he said the company purchased its own vacuum casting machine after finding outside batch timelines too slow.
Supply Chain and Import Dependence
Raghvendra said industrial robotics in India still depends heavily on imported hardware, particularly motors, PCBs, and related components.
For PCB manufacturing, he said Kikobot is currently evaluating Indian vendors by placing small orders and comparing lead time, pricing, and quality.
For hobby-grade servo motors, he said he does not see Indian manufacturers currently building suitable products for small robotic arms, so Kikobot imports directly from Chinese manufacturers.
For industrial robots, however, he said Kikobot is working with Indian vendors on BLDC motors, harmonic drives, and robot outer casings.
Building Actuators In-House
Raghvendra said Kikobot has also started building its own actuators.
He gave several reasons:
- Greater control over hardware and firmware
- Lower dependency on external suppliers
- Better lead times
- Cost pressures caused by buying actuators externally
- A desire to build more of the robot internally rather than assembling purchased subsystems
He also pointed to pricing differences in the Chinese robotics market, saying robotic arms may sell for around ₹5 lakh, while purchasing actuators separately can be significantly expensive.
Team and Hiring
Raghvendra said Kikobot has a team of around 8–10 people, with an average age of roughly 22–23.
He described the team as young and passionate, with dedicated members handling robotics software, firmware, mechanical engineering, and manufacturing design.
When hiring, he said the two most important qualities are:
- Ownership
- Communication
He said startup team members must take full responsibility for solving problems rather than operating in narrow assigned roles.
Advice for Hardware Builders
Raghvendra described hardware development as “a long expensive marathon kind of thing.”
He said hardware rarely works perfectly on the first attempt, making consistency important. He also repeated the importance of building quickly, failing quickly, and showing products to real customers early to gain practical feedback.
In closing, he encouraged engineers to pursue hardware development, saying hardware manufacturing is challenging but important, and urging builders not to avoid hardware.
