 ZPD suction unit as the end-effector of a robotic arm. (b) ZPD suction units in a hexapod wall-climbing robot. (c) ZPD suction units for a spider-man wall-climbing device.")
Researchers Xin Li and Kaige Shi have developed a zero-pressure difference (ZPD) method that can enhance the development of vacuum suction units. Specially designed suction units allow humans to climb up walls with ease. The suction units can be used on rough surfaces and textured walls, which will be helpful in the development of climbing robots and robotic arms with grasping capabilities.
The conventional suction methods struggle to maintain suction/pulling force on rough surfaces due to vacuum leakage thereby leading to suction failure. The new technique uses a high-speed rotating water ring between the surface and the device's suction cup, which creates a centrifugal force for gripping rough surfaces. The centrifugal force of the rotating water cancels out the pressure difference at the boundary of the vacuum zone and the surface, preventing vacuum leakage.
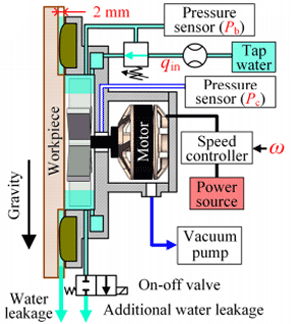
As shown above, a flowmeter is used to detect the inlet water flow rate. The water in the vacuum chamber leaks through either the radial grooves or the additional flow path controlled by the on-off valve. The power of the vacuum pump can be adjusted, so speed can be changed. The speed controller can control the rotating speed to the demanded value. The transient rotating speed can be read from the speed controller. More details can be found in the Vacuum suction unit based on the zero pressure difference method article published on the Physics of fluids.
Compared to other wall-climbing robots, the robot with our ZPD-based suction unit achieves surprising improvement in performance. The ZPD suction unit is highly energy-efficient and smaller/lighter as compared to traditional suction units. The scientists tested the ZPD unit with three different suction sizes and applications: On a robotic arm to grip and handle objects, on a hexapod wall-climbing robot, and as a Spider-Man-like wall-climbing device.
In the future, the researchers aim to cut down the water consumption so that suction unit works with a small quantity of water for a long time and the wall-climbing robots can carry their water instead of relying on connected water supply.
