
Home is where you find your mind at peace. A relaxing peaceful evening at home is one of life's greatest pleasures. What if a thief broke into your house and has a weapon and you're hiding under the bed to avoid being found, how would you alert security without giving away your location? To automate this and implement real-time surveillance of the home security, we came up with a raspberry pi project that can send abnormal images and warning messages through telegram and also receive remote instruction from the users.
You should check out our previous posts where we have made such type of security system like -
- Dog Barking Security Alarm using Arduino, PIR Sensor, and Dog Barking Sound Module
- Getting started with Home Assistant & Raspberry Pi: Control and Automate Smart Devices
- IoT based Raspberry Pi Home Security System with Email Alert
- IoT based Door Security Alarm controlled by Google Assistant
- PIR Sensor and GSM Based Security System
Component Required for Automated Security System
- Raspberry Pi 4B+
- Servo
- Piezo Buzzer
- IR sensor
- Pi Camera 5MP
- Buck Converter
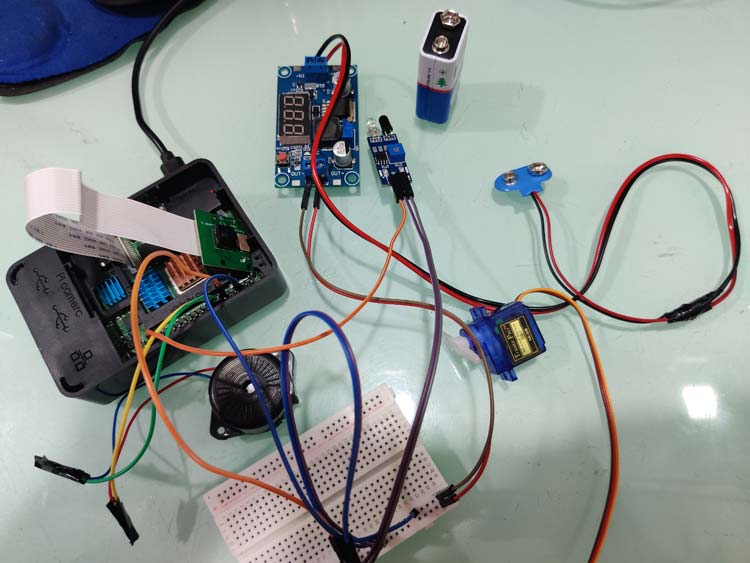
Automated Security System Circuit Diagram

As the circuit diagram shows, the Raspberry Pi is connected with the PIR Sensor, Buzzer Servo, and the Pi camera. Servo:- Signal is Connected to GPIO 17 and powered using an external power supply. Buzzer:- it is connected to GPIO 23 & GND. IR Sensor: - Out connected at GPIO 16 and powered using an external power supply. Pi Cam:- Direct connection to Raspberry Pi Board.
Automated Security System with Telegram Bot
When we were brainstorming on solving the alert issue, we pondered upon what is something that most people have with them all the time. And the most obvious answer was a smartphone. We decided to use telegram to implement our system as telegram has freely available application programming interfaces (APIs) to make bots that help collect data or automate things. We will use some more software and python libraries like Pycharm, Gsheets, Thonny IDE, Putty, WinSCP, Telegram. Python libraries : Opencv - cv2, Dlib, numpy, face_recognition, Rpi.GPIO, telepot, picamera, gspread, codecs, sys, oauth2client.service_account
Bot commands:-
/start: Initiates bot, sends a welcome message and a list of commands. /photo & /getinfo: If someone stands in front of the door, the IR sensor picks up this input and triggers the OpenCV code that runs the facial recognition algorithm and updates the output to google sheets. When the /photo command is activated it sends a picture of the camera output. Whereas when the /getinfo command is activated it displays a list of people that were detected in the past hour. /motion: Checks for presence of motion and returns a photo if true, or a message stating that no one is there if false. /buzzer: This command is used to sound an alarm in case of emergencies, where there is a fire/ burglary etc. The command triggers the buzzer function in the code and sets the GPIO pin to high which rings the buzzer. /opengate & /closegate: These commands set the angle of the servo motors accordingly to open and close the gate.
Hardware Specification for Automated Security System
Raspberry Pi 4B+: The Raspberry Pi 4 B is equipped with Latest High-Performance Quad-Core 64-bit Broadcom 2711, Cortex A72 processor clocked at 1.5GHz speed. Taking this processing power and computational speed into consideration we settled with the Raspberry Pi 4B+ for our project.
IR sensor: Infrared sensors are nowadays commonly employed in motion detectors, which are utilized in security systems to detect visitors. The sensor elements detect heat radiation (infrared radiation) that changes over time and space owing to people's movement within a predetermined angle range.
Servo: Despite its size, it generates quite the amount of power and is known to be incredibly energy-efficient, and hence we decided to use it to open/close gates.
Piezo buzzer: Because the piezoelectric buzzer is controlled by electronic circuits, it can produce a variety of pleasant sounds and analog sound, intermittent sound. Pure timbre, not easily covered by noise. With it being lightweight, simple construction, and low-cost it was instantly our choice.
PiCamera: The Pi camera module is a portable lightweight camera that supports Raspberry Pi. It is one of the best choices in surveillance projects.
Buck Converter: It helps to convert a high voltage to a low voltage.
Conclusion
With the world changing and becoming more corrupt day by day, having just a security guard to protect your family and your house isn't enough. So, this automated security system will help to alert you on your phone and you can make a way to make safe your home and office. I hope you liked this project and learned something new. If you have any questions regarding the article, you can leave them in the comment or you can use our Electronics Forum
Complete Project Code
import numpy as np
import face_recognition as fr
import cv2
import os
from datetime import datetime
import gspread
from oauth2client.service_account import ServiceAccountCredentials
# define the scope
scope = ['https://spreadsheets.google.com/feeds','https://www.googleapis.com/auth…']
# add credentials to the account
creds = ServiceAccountCredentials.from_json_keyfile_name('securitysystemias-9d50af0cc222.json', scope)
# authorize the clientsheet
client = gspread.authorize(creds)
# get the instance of the Spreadsheet
sheet = client.open('Attendance')
# get the first sheet of the Spreadsheet
sheet_instance = sheet.get_worksheet(0)
path = 'images' # images is just the name of the folder which contains the photos used to recognize the faces
images = []
classNames = []
myList = os.listdir(path)
print(myList)
for cl in myList: # loop to add all the images of our dataset in a list by splitting out the the jpg from the list
curImg = cv2.imread(f'{path}/{cl}')
images.append(curImg)
classNames.append(os.path.splitext(cl)[0])
print(classNames)
def findEncodings(images): # finds the encodings of the images
encodeList = []
for img in images:
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
encode = fr.face_encodings(img)[0]
encodeList.append(encode)
return encodeList
def updateName(name):
nameList = sheet_instance.col_values(1)
if name not in nameList:
now = datetime.now()
dtString = now.strftime('%H:%M:%S')
sheet_instance.append_row([name,dtString])
encodeListKnown = findEncodings(images)
print('Encoding complete')
cap = cv2.VideoCapture(0) # the command to turn on the default camera of the device being used
while True: # the video feed received from your camera
success, img = cap.read()
imgS = cv2.resize(img, (0,0), None, 0.25, 0.25)
imgS = cv2.cvtColor(imgS, cv2.COLOR_BGR2RGB)
facesCurFrame = fr.face_locations(imgS)
encodesCurFrame = fr.face_encodings(imgS, facesCurFrame)
for encodeFace, faceLoc in zip(encodesCurFrame, facesCurFrame):
matches = fr.compare_faces(encodeListKnown, encodeFace)
faceDis = fr.face_distance(encodeListKnown, encodeFace)
#print(faceDis)
matchIndex = np.argmin(faceDis)
if matches[matchIndex] >0.5:
name = classNames[matchIndex].upper()
#print(name)
y1, x2, y2, x1 = faceLoc
y1, x2, y2, x1 = y1 * 4, x2 * 4, y2 * 4, x1 * 4
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.rectangle(img, (x1, y2 - 35), (x2, y2), (0, 255, 0), cv2.FILLED)
cv2.putText(img, name, (x1 + 6, y2 - 6), cv2.FONT_HERSHEY_COMPLEX, 1, (255, 255, 255), 2)
updateName(name)
else:
name = 'unknown'
y1, x2, y2, x1 = faceLoc
y1, x2, y2, x1 = y1 * 4, x2 * 4, y2 * 4, x1 * 4
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.rectangle(img, (x1, y2 - 35), (x2, y2), (0, 255, 0), cv2.FILLED)
cv2.putText(img, name, (x1 + 6, y2 - 6), cv2.FONT_HERSHEY_COMPLEX, 1, (255, 255, 255), 2)
updateName(name)
cv2.imshow('webcam', img)
cv2.waitKey(1)
.............................................................................................
import telepot #library to link telegram bot
import time
import os
from picamera import PiCamera #library to use PiCamera
import RPi.GPIO as GPIO
import gspread #library to link google spreadsheet
import codecs #defines base classes for standard Python codec
import sys
from subprocess import call
from oauth2client.service_account import ServiceAccountCredentials #for pulling data from google sheets
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
path=os.getenv("HOME")
sensor = 16 #PIR sensor connected to GPIO pin 16
BUZZER = 23 #buzzer connected to GPIO pin 23
servoPIN = 17 #servo motor connected to GPIO pin 17
GPIO.setup(sensor, GPIO.IN) #GPIO pins setup as input or output pins
GPIO.setup(BUZZER, GPIO.OUT)
GPIO.setup(servoPIN, GPIO.OUT)
p = GPIO.PWM(servoPIN, 50) #servo motor made as a PWM pin
p.start(2.5) #initialised
scope = ['https://spreadsheets.google.com/feeds','https://www.googleapis.com/auth…'] #define the scope
creds = ServiceAccountCredentials.from_json_keyfile_name('securitysystemias-9d50af0cc222.json', scope) #add credentials to the account
client = gspread.authorize(creds) #authorize the clientsheet
sheet = client.open('loginandout') #get the instance of the Spreadsheet
def getWtv(datalist): #function to get a list of lists, where every list is a row from the Spreadsheet
info=[]
for rowdict in datalist:
x=[]
a=rowdict.get("Name").encode('ascii')
b=rowdict.get("Time").encode('ascii')
x.append(a)
x.append(b)
info.append(x)
return info
def buzz(noteFreq, duration): #customized buzzer sound
halveWaveTime = 1 / (noteFreq * 2 ) #getting half time period from note freq.
waves = int(duration * noteFreq) #getting waves from freq.
for i in range(waves): #for each wave buzzer is sounded for duration of note
GPIO.output(BUZZER, True)
time.sleep(halveWaveTime) #buzzer made to sound for half time period
GPIO.output(BUZZER, False) #buzzer is turned off
time.sleep(halveWaveTime) #delay for half time period
def play(): #to play custom sound
t=0
notes=[617, 824, 980, 873, 824, 1234, 1100, 925, 824, 980, 873, 777, 873, 617] #notes of the tune
duration=[1, 1.5, 0.5, 1, 2, 1, 2.5, 2.5, 1.5, 1, 1, 2, 1, 2.5] #duration of each note
for n in notes:
buzz(n, duration[t]) #buzzer sounded for particular note and its duration
time.sleep(duration[t] *0.1) #delay for duration of note
t+=1
def handleMessage(msg):
id = msg['chat']['id']; #id stores the bot and the id the message is received from
command = msg['text']; #command stores the message that is received
print ('Command ' + command + ' from chat id' + str(id)); #command is printed
if (command == '/start'): #when the bot is started the welcome message is displayed
bot.sendMessage(id,"Welcome to the Security Bot of XYZ society \n list of Commands :- \n /getinfo:- will return a list of people recognized in past 15 mins \n /motion :- motion sensing for 7 seconds if motion is detected you will recieve a photo or message stating that no one is there \n/buzzer:- emergency buzzer sound \n /opengates or /closegates :- to open or close the gate \n /photo:- will send a live photo")
elif(command=='/buzzer'): #the buzzer is sounded with play function
bot.sendMessage(id,"Buzzer Initiated") #message is sent to the bot that buzzer is initiated
play()
elif(command=='/opengate'): #gates are opened with help of servo motor
bot.sendMessage(id,"Gates Opened ")
p.ChangeDutyCycle(7.5) #servo is made to rotate 90 degrees
time.sleep(2) #delay for 2 secs
elif(command=='/closegate'): #gates are closed
bot.sendMessage(id,"Gates Closed")
p.ChangeDutyCycle(5) #servo rotated 90 degrees
time.sleep(2) #delay 2 secs
elif(command=='/getinfo'): #get info gives information as to who all got in last
bot.sendMessage(id,"The People Entered in the main gate in the last 15 mins are :- ")
sheet_instance = sheet.get_worksheet(0) # get the first sheet of the Spreadsheet
records_data = sheet_instance.get_all_records() #list of dictionaries, where every dictionary is a row of the Spreadsheet
y=getWtv(records_data)
print(y)
bot.sendMessage(id,y) #sending function output to bot
elif(command=='/photo'): #sends a photo to the telegram bot
bot.sendMessage(id,"Sending Photo ....")
camera = PiCamera(); #Pi camera is started
camera.start_preview() #camera is initialized
camera.capture(path + '/piclive.jpg',resize=(640,480)) #picture is captured in path folder and resized
time.sleep(2) #delay of 2 sec
camera.stop_preview() #camera is stopped
camera.close() #camera is closed
bot.sendPhoto(id, open(path + '/piclive.jpg', 'rb')) #the photo is sent to the bot in binary format
time.sleep(0.1) #delay of 100ms
elif(command == '/motion'): #sends a photo if someone is detected in front of gate
bot.sendMessage(id,"Checking If someone is There")
for a in range(7): #loop to check if anyone is there
if (GPIO.input(sensor)==0): #if PIR sensor detects movement
print ("Object Detected") #object detected is printed
camera = PiCamera(); #Pi camera is started
camera.start_preview()
camera.capture(path + '/pic.jpg',resize=(640,480)) #photo is captured and resized in folder path
time.sleep(2) #delay of 2 sec
camera.stop_preview()
camera.close() #camera is closed
bot.sendPhoto(id, open(path + '/pic.jpg', 'rb')) #photo sent to telegram bot
time.sleep(0.1)
else: #if no motion is detected by PIR sensor
bot.sendMessage(id,"No one is there") #message sent to telegram bot
print("No one is there")
time.sleep(2) #delay for 2 secs
else:
bot.sendMessage(id, "Invalid Command try /start for list of all commands ") #if unknown command received invalid command is sent to telegram bot
bot = telepot.Bot('AUTH TOKEN'); #the telegram bot is linked
bot.message_loop(handleMessage); #the handle message to receive and check commands is looped
print ("Listening to bot message");
while 1: #main loop
time.sleep(10); #delay for 10 sec
