
A Signal Generator is one of the most important lab equipment for an Electronics Engineer. A waveform or an electrical signal is generated using this device which lets an engineer to design and optimize their systems. As a result, these devices are mostly used in various systems as test instruments, development systems, and so on. Signal generators come in a variety of shapes and sizes, with each type being used to generate different types of signals, such as audio, RF, pulse, analogue, digital, and so on. These systems have been around for a long time, but today's signal generators are quite complex in terms of performance, features, and so on. In this article, we will be learning more about Signal Generators and the parameters we need to check while purchasing a signal generator.
If you are interested in building it yourself, you can find more projects on signal generators on our website, you might also be interested in the DIY Waveform Generator using Arduino.
Brief Description about Signal Generator’s Working!!!
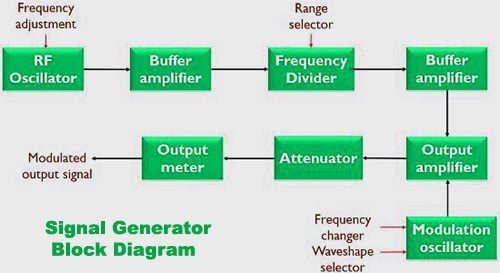
The main use of the signal generator is to provide different signals for hardware designing, troubleshooting, and testing, thus a variety of signal generators are available in the market with different specifications and functionalities. In the below image, we are discussing a generalized Block Diagram of a signal generator. As shown in the block diagram of a RF signal generator, there are two inputs, one is for adjusting the frequency and amplitude of the output signal and another one is for selecting the type of waveform.
Signal Generators have a Voltage Controlled Oscillator (VCO). The output of VCO can be varied over a range by changing the input DC voltage. The output frequency of VCO is directly related to the voltage at its input thus by changing the input voltage, we can control the output frequency. The output from the oscillator is fed to a frequency divider through a buffer amplifier. The buffer amplifier is used to isolate the circuit and prevent the signal source from being affected by the load. The signal from the buffer amplifier is fed to an output amplifier which amplifies the signal. The output is given to an attenuator which adjusts the voltage of the signal which is then given to the output through an output meter, which measures the output and gives feedback in order to maintain the output.
Types of Signal Generators
A signal generator is a test equipment that can generate repeating or non-repeating signals. Signal generators can be classified based on the type of signals they can produce or the range of signal output they can generate. The signal generator’s output can be varied by controlling the amplitude and frequency of the generated signal during real-time testing.
Some of the most common types of signal generators are Functional generator, RF signal Generator, Arbitrary Waveform Generator, Analog Signal Generator, Logical Signal Generator, Video Signal Generator, etc. and brief description of all these types is mentioned below:
Functional Signal Generator
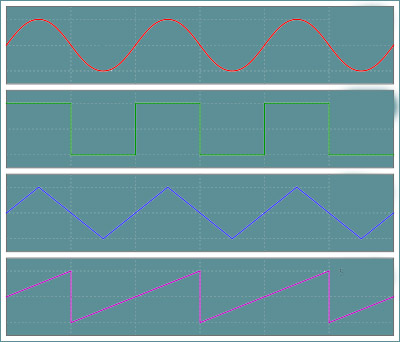
A function generator is one of the most commonly used signal generators. It is capable of producing repetitive waveforms such as sinusoidal waves, sawtooth waves, square waves, triangular waves, and even pulse waves. They have an electronic oscillator circuit that generates these signals. Modern devices utilize digital signal processing (DSP) techniques to generate signals and the generated signals are then converted into an Analog Signal.
One of the important features of the function generator is the capability of adding a DC offset to the signal, which makes it very useful for testing applications. Typically function generators operate up to 100kHz to a few MHz, but expensive function generators can produce signals more than 100s of MHz.
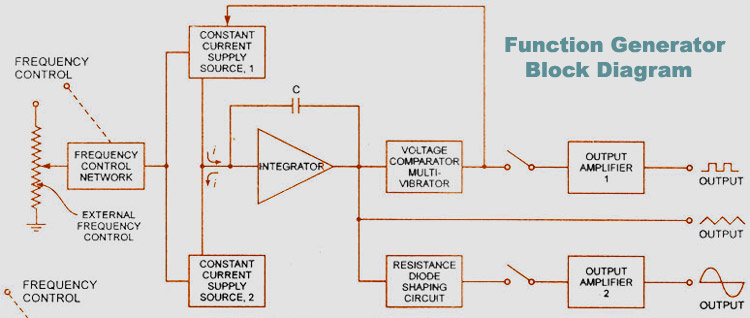
Function generators are most commonly used in laboratories of educational institutes and for stimulus testing and repairing electrical and electronic equipment. A block diagram of the function generator is given below.
Radio Frequency Signal Generator
Radio Frequency Signal Generator or RF signal generators are the most essential testing equipment where radio frequency or microwave testing and development is required. Similar to other signal generators, most RF generators do not have measurement capability, they are just used for producing controlled signals with variable frequency, amplitude, and modulation which can be used to check the response of circuitry in order to debug or modify the circuit.
The power output of a RF signal generator is defined in terms of dB relative to 1milliwatt (dBm). The most common power output available in RF signal generator is +13dB. The power level in dBm to power level in milliwatt is given below.
|
POWER LEVEL |
POWER LEVEL |
|---|---|
|
0 |
1 |
|
3 |
2 |
|
10 |
10 |
|
13 |
20 |
|
20 |
100 |
|
23 |
200 |
Audio Frequency Signal Generator
A signal generator that is capable of producing signals in the frequency range of Audio Frequency (AF) is called an Audio Frequency signal generator. Audio frequency belongs from 20 Hz to 20kHz. A block diagram of a simple sine wave/ square wave AF signal generator is given below:
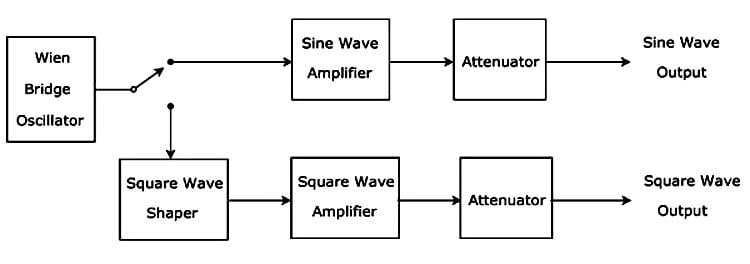
The Audio Frequency generators are most commonly used for checking the response of audio equipment, these instruments are also used for measuring distortions in any other equipment and have the capability to produce a distortion of 0.0001% by a simple audio signal generator.
Arbitrary Signal Generator (ASG)
Arbitrary signal generators are advanced form of function generators. Similar to function generators, ASG is capable of producing digital or analog waveforms by the input values we enter. These input values are called ‘waypoints’. Therefore, arbitrary signal generators are able to generate any kind of waveform and hence are the most versatile types of signal generators.
Vector Signal Generators
Vector Signal Generators, also known as digital signal generators are capable of producing digitally modulated signals. They are used for generating RF signals having complex modulation formats like BPSK, QPSK, QAM, etc. These testing equipment are used for testing both military and normal communication systems, the advanced vector signal generators are capable of generating industry standard signals such as GSM, W-CDMA, LTE, Wi-Fi, and the military communications system such as JTRS which are required to be extremely secure from the cyber-attacks. The image of a vector signal generator is given below:

Video Signal Generators
Video signal generators are a special type of signal generator that is used for producing video waveforms. These devices are used to help in the calibration of televisions or other video systems by stimulating faults. VSG produces synchronized signals which are in the form of horizontal and vertical pulses and are also capable of producing color burst signals.
The video signal generators are mostly used during the development and testing of the video equipment as well as for calibration of the same.

What to consider while selecting a Signal Generator?
When buying a signal generator, we have a lot of options available in the market. Signal generators come in all shapes and sizes with few models costing lower than $50 while some equipment costing more than 10,000s of USDs. So, before deciding a model we need to know our exact requirements, the type of signal we need, and other parameters such as frequency and accuracy. In the next section, I will briefly explain the parameters we need to consider before making the purchase.
Waveforms and Modulations
The most important parameter we need to consider before starting a signal generator search is the type of waveforms it can produce. As explained above, function generators are capable of producing simple signals like sinusoidal waveforms, step signals, saw tooth, etc, but if you require any advance or custom signals then you might have to go for an Arbitrary Signal Generator. Therefore, the first and most important parameter before selecting a function generator is to know the type of signal you need from it.
Frequency Range
As explained above, signal generators are testing equipment that are used for testing different kind of circuitry, be it audio circuitry or high-frequency radio circuitry. We need to select a compatible signal generator depending on the circuits that need to be tested. A function generator is capable of producing signals up to few megahertz, but if you need to test advanced RF circuits, you need to purchase a RF and microwave signal generator that is capable of producing frequencies in the range of a few GHz. Therefore, before selecting a signal generator, we have to make sure that it has a usable frequency range for our application.
Resolution
Resolution is one of the most important parameters in measurement systems. It measures the smallest amplitude at which an electronic instrument can distinguish 2 points in a waveform. In simpler words, it is the lowest quantity our instrument can detect and display. Higher the resolution of measuring equipment, the instrument will be capable of displaying smaller values of measuring units.
Sampling Rate
The sampling rate is defined by the number of samples per second. A higher sampling rate is essential for achieving higher accuracy and greater resolution. According to the Nyquist principle, if the sampling rate is greater than twice the maximum frequency the perfect signal reconstruction is achievable.
Phase Locking Mode
If you are working with RF signals, your signal generator needs to have the phase-locking capability for synchronization. Phase locking with a local oscillator or clock is commonly done while dealing with high-frequency circuits.
Output Impedance
Output impedance is also an important parameter when selecting a signal generator. If we want to use our signal generator in an RF circuit or connecting it to a transmission line, then we should have a high output impedance that matches the impedance of the transmission line while the output impedance of the signal generator is desired to be minimum when using the signal generator as a voltage source.
Conclusion
Signal generators are one of the most important tools for an electronics engineer, it helps in designing and troubleshooting of electronic circuits. There are various types of signal generators available in the market. The selection of signal generator depends on the type of electronic circuits which needs to be tested and while selecting a signal generator we need to check parameters such as resolution, sample rate, output impedance, frequency, types of waveforms it can generate, etc. So, I hope that this article has helped you learning something new about signal generators, so, if you have any questions, please feel free to ask them in the comments below.
