India Automation Challenge 2021
OR

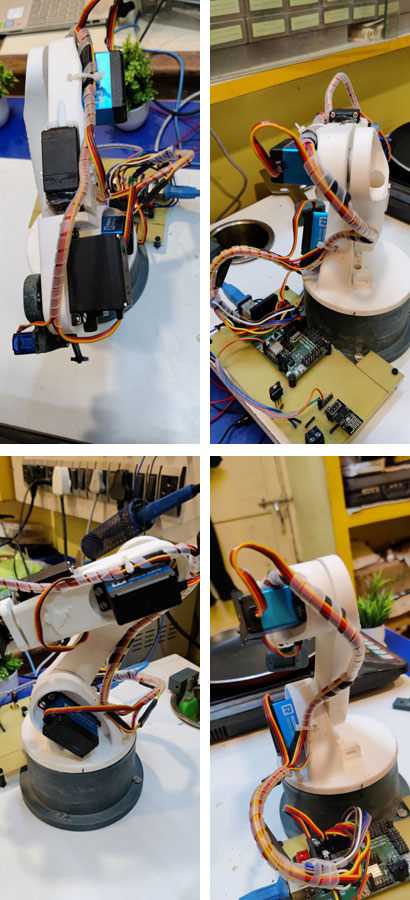
.jpg "AUTOmelette Automated Articulated Omelette Cooking Robot")
As we are aware that, a large number of young individuals stay away from their home for higher education, jobs & other stuff. An average individual spends near about 30 to 35 rupees on an average daily on breakfast. We often imagine how working individuals are busy in their hectic daily schedule, meanwhile they tend to get exhausted while returning from their jobs and then end up buying online food which is quite expensive or in some cases unhealthy too. Same applies to Hostellers or abroad studying college students who have to either make their own food after returning from a tiresome day from their college or have to depend on mess for breakfast or brunch. But it is costly and unhealthy to eat online fast-food like everyday burgers, pizzas, chinese , etc or stale food at mess. Thus, we decided to research and work on a project using which we can overcome this problem. Hence, we came up with an ideation of automating this cooking process, so that every individual can enjoy homemade food which will eventually be prepared by a robot in a hygiene surrounding. Also, we took it to the next step by accepting the challenge to start the cooking process by accepting command through Google Assistant and serving the food hot when the respective person reaches home. This is a prototype model, real ones need a little high investments, but through completions like this we hope we would stand better in future & keep working on this research. Further we are eager to work on this, more deeply & dive into AI Kitchens driven by Robots. This invention, which is now in prototype phase, would benefit further to people living out of their city, college students, college campuses, industry areas, meeting rooms, conference halls, etc . Its just like a Coffee machine fitted everywhere, the same way this robot can also be taken into applications in variety of areas in a few bucks.
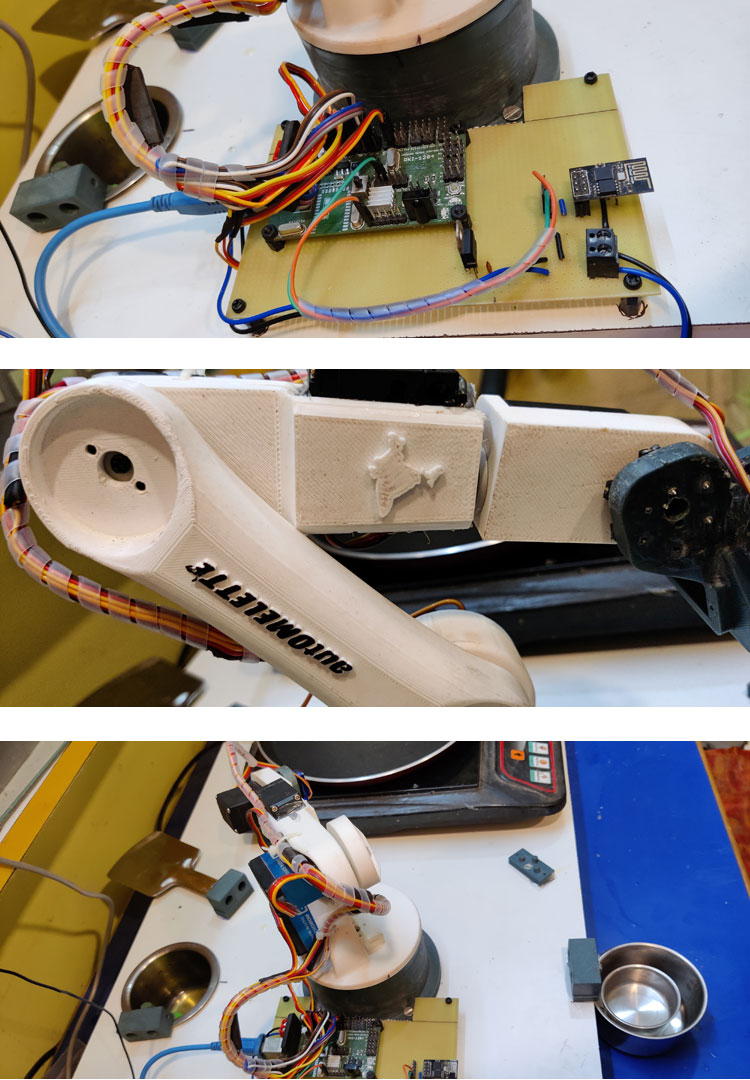
1. 3 x 20 Kgcm High Torque Servo Motors (Robokits) 2. 2 x MG996R motors with 10Kgcm. 3. SG90 motor with 2kgcm (locking system.) 4. Robokits servo motor controller board. 5. ESP8266-01 module. 6. Jumper Cables 7. Induction cooktop. 8. 0-12 Volts Variable Power Supply 9. Steel Spatula 10. Silicon Brush(for oil) 11. Steel Measure Cup(60ml), ETC (Only Main components mentioned, other miscellaneous)
1. Solid works 2. Easyeda 3. Robokits servo controller software 4. Arduino IDE 5. Google Assistant 6. IFTTT 7. Adafruit IO
Hardware Selection :- 1) Motors Selection - While designing we considered stepper Motors as our first preference as the required torque was high, but these are quite bulky and robust, which results to huge cost of motors, also it was not possible to design an arm consisting of stepper motors with low budget. Thus, we went for Servo Motors which would go in our budget. We have selected 3 * 20 Kg/cm high torque motors from which 1 motor is at the base for 1st axial rotation of the arm and other 2 motors are used for 2nd and 3rd axial movement of upper and lower arm. 2 * 10Kgcm is used for axial movement of wrist of the Arm. One 2Kgcm motors is used for locking mechanism of attachable equipment like Spoon, Oil brush and Spatula. 2) Controller Selection - At the beginning, we selected Arduino Uno as our main control board, but it was not feasible to control the positions of arm in real-time which would also take large amount of time for programming the same. Thus, we changed to ARDUINO UNO BASED USB 18 SERVO CONTROLLER which consist of Onboard ATMEGA 328p chip with I2C interface for up to 18 servos. This board was easy to program with a GUI for controlling each servo in real-time which eventually saved our time for programming. Also, an ESP8266-01 is interfaced with this controller board for communication with ADAFRUIT cloud. Whenever the order is placed by user the ESP sends signal to controller to begin the cooking process. Software Selection : Solid works – We found the best software till now for creating 3d models is SolidWorks, Hence as we were familiar with it since diploma, we managed well with this software. EasyEDA – The most popular & makers favourite software for creating schematics & playing with PCBs EasyEDA was used to design the schematic of this project. Robokits servo controller software – It is GUI used to control servos in Realtime, means whenever you establish a connection with this board & open their GUI, we can freely move any of the servos among 18 to any angle & also record the steps for future use. This saved our lot of time for programming & also it was literally not possible to admin/upload code, then check whether servo angle is correct or not, vice versa .This software does most of the work done. Arduino IDE - It is an Integrated Development Environment software used to compile and admin/upload codes to any Arduino boards. Google Assistant – It is an artificial intelligence powered virtual assistant developed by Google which can take commands or questions (commands for our project) and respond to it accordingly. In our project it triggers the IFTTT on saying – “Hey Google” and then “Prepare an omelette i am hungry” command. IFTTT – We have used it as a mediator between Google Assistant and Adafruit service. Whenever the Google Assistant receives a predefined command, it triggers the IFTTT which in turn triggers the adafruit io button. Also, we have used the geo location tracking service to trigger the adafruit button when the user enters a predefined area. Adafruit IO – It responds to the trigger of IFTTT by setting the button as HIGH which is further read by ESP01 which is constantly observing the state of buttons.
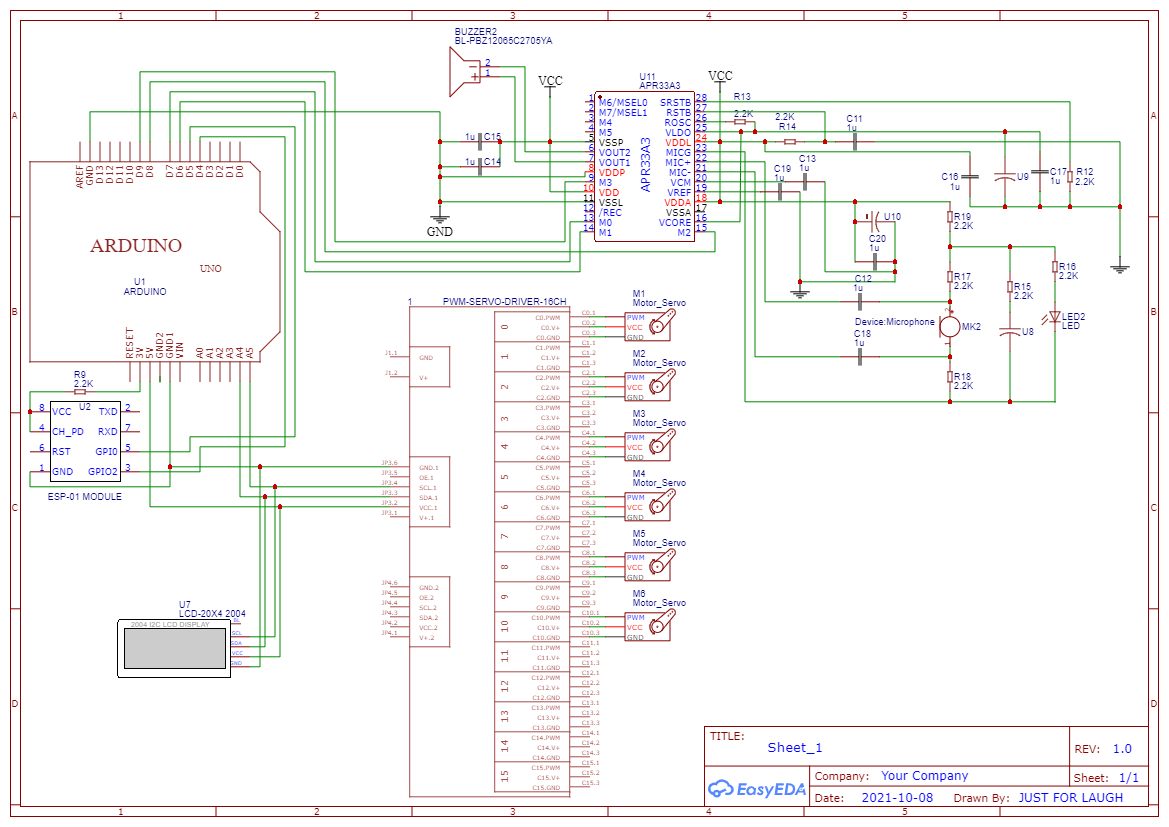
Explanation All the servo motors are connected to Arduino via servo control board. But we have used Arduino Uno Based USB 18 Servo Controller board practically which is capable of interfacing servos. Esp8266-01 controller is used to for IOT part of our project, the GPIO 2 pin is connected to D4 pin of Arduino. The pin is high when esp01 receives command from adafruit io which is read by Arduino and further cooking processes are carried out. In order to provide a good user experience an LCD and Voice playback module can be interfaced with the controller. LCD will display the current cooking process being carried out and also the time remaining to complete the cooking process. There is no as such explanation in the circuit diagram, everything else used is open source. An APR33A3 Voice Record & Playback Module can be used to provide audio playback of the cooking process being carried out, also it can inform user after the completion of cooking process.
#define ToCont 2 #define WLAN_SSID "AME" // Your SSID /************************* Adafruit.io Setup *********************************/ #define AIO_SERVER "io.adafruit.com" //Adafruit Server //WIFI CLIENT Adafruit_MQTT_Client mqtt(&client, AIO_SERVER, AIO_SERVERPORT, AIO_USERNAME, AIO_KEY); Adafruit_MQTT_Subscribe Loc = Adafruit_MQTT_Subscribe(&mqtt, AIO_USERNAME"/feeds/Location"); // Feeds name should be same everywhere Adafruit_MQTT_Publish photocell = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/google-assistant"); void MQTT_connect(); void setup() { pinMode(ToCont, OUTPUT); WiFi.begin(WLAN_SSID, WLAN_PASS); Serial.println("WiFi connected"); uint32_t x=0; void loop() { Adafruit_MQTT_Subscribe *subscription; void Send_Out() { if(currentstate != laststate) if( currentstate == 0 && laststate == 1) void MQTT_connect() { if (mqtt.connected()) { Serial.print("Connecting to MQTT... "); uint8_t retries = 3; ................................................................................................................................... /* ROBOKITS ARDUINO USB/BLUETOOTH 18 SERVO CONTROLLER FIRMWARE This code is generated from Robokits Arduino Bluetooth/USB Servo Controller software. Firmware contains 2 parts (functions in void loop()) - 1. Run in PC controlled Mode and 2. Run User Code If the code is moved to other servo base platform like a robot, offsets must be set properly so that servos will move correctly as per program. */ #include <Wire.h> #define servo1 (16>>1) #define SERIAL_BUFFER_SIZE 256 void I2C_SERVOSET(unsigned char servo_num,unsigned int servo_pos); volatile int cnt,c,servoval; int interval=100; #define State_Start 0 #define ipfromesp D4 void setup() void loop() void CheckEndMovement(void) LEDToggle(); void I2C_SERVOSET(unsigned char servo_num,unsigned int servo_pos) if(servo_pos>501) if(servo_num<19) void I2C_SERVOMIN(unsigned char servo_num,unsigned int servo_pos) if(servo_num<19) void I2C_SERVOMAX(unsigned char servo_num,unsigned int servo_pos) if(servo_num<19) void I2C_SERVONUTRALSET(unsigned char servo_num,unsigned int servo_pos) if(servo_num<19) void I2C_SERVOSPEED(unsigned char value) void I2C_SERVOOFFSET(unsigned char servo_num,int value) if (value<-500) if(value>0) void I2C_SERVOREVERSE(unsigned char servo_num,unsigned char servo_dir) char I2C_SERVOEND(void) n = Wire.endTransmission(false); delayMicroseconds(350); return(buffer); int I2C_SERVOGET(int servo_num) n = Wire.write((servo_num-1)+(18*8)); n = Wire.endTransmission(false); delayMicroseconds(240); int I2C_SERVOGETOFFSET(int servo_num) n = Wire.write((servo_num-1)+(182)); n = Wire.endTransmission(false); delayMicroseconds(240); void LEDToggle(void) void MoveServos(void) delay(1000); // Line # 0 delay(1000); // Line # 0 I2C_SERVOSPEED(82); // Line # 7 //------------------------------SPATULA PICKING PROCESS------------------------------ delay(1000); // Line # 0 void UserCode(void) //------------------------------Configuration------------------------------ I2C_SERVOMAX(1,2500); I2C_SERVOMAX(2,2500); I2C_SERVOMAX(3,2500); I2C_SERVOMAX(4,2500); I2C_SERVOMAX(5,2500); I2C_SERVOMAX(6,2500); I2C_SERVOMAX(7,2500); I2C_SERVOMAX(8,2500); I2C_SERVOMAX(9,2500); I2C_SERVOMAX(10,1194); I2C_SERVOMAX(11,2500); I2C_SERVOMAX(12,2500); I2C_SERVOMAX(13,2500); I2C_SERVOMAX(14,2500); I2C_SERVOMAX(15,2500); I2C_SERVOMAX(16,2500); I2C_SERVOMAX(17,2500); I2C_SERVOMAX(18,2500); //Maximum Values I2C_SERVOMIN(1,500); I2C_SERVOMIN(2,500); I2C_SERVOMIN(3,500); I2C_SERVOMIN(4,500); I2C_SERVOMIN(5,500); I2C_SERVOMIN(6,500); I2C_SERVOMIN(7,500); I2C_SERVOMIN(8,500); I2C_SERVOMIN(9,500); I2C_SERVOMIN(10,500); I2C_SERVOMIN(11,500); I2C_SERVOMIN(12,500); I2C_SERVOMIN(13,500); I2C_SERVOMIN(14,500); I2C_SERVOMIN(15,500); I2C_SERVOMIN(16,500); I2C_SERVOMIN(17,500); I2C_SERVOMIN(18,500); //Minimum Values I2C_SERVOOFFSET(1,1500); I2C_SERVOOFFSET(2,1500); I2C_SERVOOFFSET(3,1500); I2C_SERVOOFFSET(4,1500); I2C_SERVOOFFSET(5,1500); I2C_SERVOOFFSET(6,1500); I2C_SERVOOFFSET(7,1500); I2C_SERVOOFFSET(8,1500); I2C_SERVOOFFSET(9,1500); I2C_SERVOOFFSET(10,1500); I2C_SERVOOFFSET(11,1500); I2C_SERVOOFFSET(12,1500); I2C_SERVOOFFSET(13,1500); I2C_SERVOOFFSET(14,1500); I2C_SERVOOFFSET(15,1500); I2C_SERVOOFFSET(16,1500); I2C_SERVOOFFSET(17,1500); I2C_SERVOOFFSET(18,1500); //Offset Values I2C_SERVOREVERSE(1,0); I2C_SERVOREVERSE(2,0); I2C_SERVOREVERSE(3,0); I2C_SERVOREVERSE(4,0); I2C_SERVOREVERSE(5,0); I2C_SERVOREVERSE(6,0); I2C_SERVOREVERSE(7,0); I2C_SERVOREVERSE(8,0); I2C_SERVOREVERSE(9,0); I2C_SERVOREVERSE(10,0); I2C_SERVOREVERSE(11,0); I2C_SERVOREVERSE(12,0); I2C_SERVOREVERSE(13,0); I2C_SERVOREVERSE(14,0); I2C_SERVOREVERSE(15,0); I2C_SERVOREVERSE(16,0); I2C_SERVOREVERSE(17,0); I2C_SERVOREVERSE(18,0); //Directions (Servo Reverse) }
#include <ESP8266WiFi.h>
#include "config.h"
#include "Adafruit_MQTT.h"
#include "Adafruit_MQTT_Client.h"
int GoogleAssistant;
int Loc_State;
int GA_State;
#define WLAN_PASS "tushar007" // Your password
#define AIO_SERVERPORT 1883
#define AIO_USERNAME "Automelette"
#define AIO_KEY "aio_qKuB11XwBqowiAs3nVdxk1cNPPhD"
WiFiClient client;
Adafruit_MQTT_Subscribe GA = Adafruit_MQTT_Subscribe(&mqtt, AIO_USERNAME"/feeds/google-assistant");
Serial.begin(9600);
// Connect to WiFi access point.
Serial.println(); Serial.println();
Serial.print("Connecting to ");
Serial.println(WLAN_SSID);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println();
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
mqtt.subscribe(&Loc);
mqtt.subscribe(&GA);
}
int laststate = 0, currentstate = 0;
MQTT_connect();
while ((subscription = mqtt.readSubscription(20000))) {
if (subscription == &Loc) {
Serial.println(F("Got_Loc: "));
Serial.println((char *)Loc.lastread);
Loc_State = atoi((char *)Loc.lastread);
}
if (subscription == &GA) {
Serial.print(F("Got_GA: "));
Serial.println((char *)GA.lastread);
GA_State = atoi((char *)GA.lastread);
Serial.println("Received from GA");
}
Send_Out();
}
Send_Out();
}
if(GA_State && Loc_State == 1)
{
digitalWrite(ToCont,HIGH);
Serial.println("ToCont HIGH");
}
else{
digitalWrite(ToCont,LOW);
Serial.println("ToCont LOW");
}
if(Loc_State == 1)
{
currentstate = 1;
}
else
{
currentstate = 0;
}
{
}
{
Serial.print(F("\nSending val ToCont"));
Serial.print(x);
Serial.print("...");
if (! photocell.publish(0)) {
Serial.println(F("Failed"));
}
else {
Serial.println(F("OK!"));
}
}
Serial.println("HEre am I");
Serial.print("Loca State");
Serial.println(Loc_State);
Serial.print("Current");
Serial.println(currentstate);
Serial.print("Last");
Serial.println(laststate);
laststate = currentstate;
}
int8_t ret;
return;
}
while ((ret = mqtt.connect()) != 0) {
Serial.println(mqtt.connectErrorString(ret));
Serial.println("Retrying MQTT connection in 5 seconds...");
mqtt.disconnect();
delay(5000);
retries--;
if (retries == 0) {
while (1);
}
}
Serial.println("MQTT Connected!");
}
The hardware consist of 2 AVRs out of which one is Master and has Arduino bootloader. The second one is slave and runs all servo routines.
The master controls slave through I2C and slave operates all servos.
Many pins of the main controller are free and can be used for connecting other peripherals and interfaces.
The code is selected through a Jumper on Servo controller board.
You can change the user code as per your need.
This code is generated for Arduino UNO board profile and the same should be chosed while programming with Arduino IDE.
Arduino IDE veersion 1.6.5 + is recommended.
#define servo2 (18>>1)
#define UART_BAUD_RATE 115200
#define LED 13
void I2C_SERVOREVERSE(unsigned char servo_num,unsigned char servo_dir);
void I2C_SERVOOFFSET(unsigned char servo_num,int value);
void I2C_SERVOSPEED(unsigned char value);
void I2C_SERVONUTRALSET(unsigned char servo_num,unsigned int servo_pos);
void I2C_SERVOMIN(unsigned char servo_num,unsigned int servo_pos);
void I2C_SERVOMAX(unsigned char servo_num,unsigned int servo_pos);
char I2C_SERVOEND(void);
int I2C_SERVOGET(int servo_num);
int I2C_SERVOGETOFFSET(int servo_num);
void CheckEndMovement(void);
void PCControlledCode(void);
void UserCode(void);
void LEDToggle(void);
volatile char state,servobuf[36],bytecnt;
unsigned long previousMillis=0;
unsigned long currentMillis = millis();
char runCode =0; //1 for PC controlled, 0 for user controlled
char LEDState=0;
#define State_Command 1
#define State_Servoposition 2
#define State_Speed 3
#define State_Servomin 4
#define State_Servomax 5
#define State_Servooffset 6
#define State_Servoreverse 7
#define State_Servonutral 8
#define State_ReadOffsets 9
int ipstate;
{
cnt=0;
int i;
unsigned int x;
char buffer[10],tmp,tmp1;
float range;
Serial.begin(UART_BAUD_RATE);
Serial.write('S');
Serial.write('r');
pinMode(13, OUTPUT);
pinMode(2, OUTPUT);
pinMode(8, INPUT);
digitalWrite(8,1);
delay(500);
sei();
Wire.begin();
TWSR = 3; // no prescaler
TWBR = 18; //Set I2C speed lower to suite I2C Servo controller
pinMode(2,OUTPUT);
digitalWrite(2,HIGH);
delay(500);
state=State_Start;
if (digitalRead(8))
{
runCode=1;
}
else
{
runCode=0;
}
}
{
if (runCode ==1)
{
PCControlledCode();
}
else
{
UserCode();
LEDToggle();
}
}
void PCControlledCode(void)
{
currentMillis = millis();
if(Serial.available()>0)
{
c=Serial.read();
previousMillis = currentMillis;
if(state==State_Start)
{
if(c==170)
state=State_Command;
}
else if(state==State_Servoposition)
{
servobuf[bytecnt]=c;
bytecnt++;
if(bytecnt==36)
{
for(int i=1;i<19;i++)
{
servoval=servobuf[(i*2)-1]<<7;
servoval=servoval+servobuf[(i*2)-2];
I2C_SERVOSET(i,servoval);
}
bytecnt=0;
state=State_Start;
Serial.write('r');
CheckEndMovement();
previousMillis = currentMillis;
}
}
else if(state==State_Speed)
{
I2C_SERVOSPEED(c);
state=State_Start;
Serial.write("rs");
CheckEndMovement();
}
else if(state==State_Servomin)
{
servobuf[bytecnt]=c;
bytecnt++;
if(bytecnt==36)
{
for(int i=1;i<19;i++)
{
servoval=servobuf[(i*2)-1]<<7;
servoval=servoval+servobuf[(i*2)-2];
I2C_SERVOMIN(i,servoval);
delay(20);
}
bytecnt=0;
state=State_Start;
Serial.write("rn");
CheckEndMovement();
previousMillis = currentMillis;
}
}
else if(state==State_Servomax)
{
servobuf[bytecnt]=c;
bytecnt++;
if(bytecnt==36)
{
for(int i=1;i<19;i++)
{
servoval=servobuf[(i*2)-1]<<7;
servoval=servoval+servobuf[(i*2)-2];
I2C_SERVOMAX(i,servoval);
delay(20);
}
bytecnt=0;
state=State_Start;
Serial.write("rx");
CheckEndMovement();
previousMillis = currentMillis;
}
}
else if(state==State_Servooffset)
{
servobuf[bytecnt]=c;
bytecnt++;
if(bytecnt==36)
{
for(int i=1;i<19;i++)
{
servoval=servobuf[(i*2)-1]<<7;
servoval=servoval+servobuf[(i*2)-2];
I2C_SERVOOFFSET(i,servoval);
delay(20);
}
bytecnt=0;
state=State_Start;
Serial.write("ro");
CheckEndMovement();
previousMillis = currentMillis;
}
}
else if(state==State_Servoreverse)
{
servobuf[bytecnt]=c;
bytecnt++;
if(bytecnt==18)
{
for(int i=1;i<19;i++)
{
I2C_SERVOREVERSE(i,servobuf[(i-1)]);
delay(20);
}
bytecnt=0;
state=State_Start;
Serial.write("rv");
CheckEndMovement();
previousMillis = currentMillis;
}
}
else if(state==State_Servonutral)
{
servobuf[bytecnt]=c;
bytecnt++;
if(bytecnt==36)
{
for(int i=1;i<19;i++)
{
servoval=servobuf[(i*2)-1]<<7;
servoval=servoval+servobuf[(i*2)-2];
I2C_SERVONUTRALSET(i,servoval);
}
bytecnt=0;
state=State_Start;
Serial.write("rn");
CheckEndMovement();
previousMillis = currentMillis;
}
}
else if(state==State_ReadOffsets)
{
Serial.write("O");
for(int i=1;i<19;i++)
{
Serial.print(I2C_SERVOGETOFFSET(i));
Serial.write(",");
delay(1);
}
Serial.write("F");
state=State_Start;
Serial.write('r');
CheckEndMovement();
previousMillis = currentMillis;
}
else if(state==State_Command)
{
if(c==8)
state=State_Speed;
if(c==10)
state=State_Servoposition;
if(c==11)
state=State_Servomin;
if(c==12)
state=State_Servomax;
if(c==13)
state=State_Servooffset;
if(c==14)
state=State_Servoreverse;
if(c==15)
state=State_Servonutral;
if(c==21)
state=State_ReadOffsets;
bytecnt=0;
}
else
{
Serial.write('e');
CheckEndMovement();
}
}
else
{
if ((unsigned long)(currentMillis - previousMillis) >= interval)
{
Serial.write('i');
Serial.write('r');
CheckEndMovement();
previousMillis = currentMillis;
}
}
}
{
if(I2C_SERVOEND())
Serial.write('X');
else
Serial.write('G');
}
{
if(servo_pos<500)
servo_pos = 500;
else if(servo_pos>2500)
servo_pos=2500;
servo_pos=(((servo_pos-2)*2)-1000);
else
servo_pos=0;
Wire.beginTransmission(servo1);
else
Wire.beginTransmission(servo2);
Wire.write(servo_num-1);
Wire.write(servo_pos>>8);
Wire.write(servo_pos & 0XFF);
Wire.endTransmission();
}
{
if(servo_pos<500)
servo_pos = 500;
else if(servo_pos>2500)
servo_pos=2500;
servo_pos=((servo_pos*2)-1000);
Wire.beginTransmission(servo1);
else
Wire.beginTransmission(servo2);
Wire.write((servo_num-1)+(18*4));
Wire.write(servo_pos>>8);
Wire.write(servo_pos & 0XFF);
Wire.endTransmission();
delay(20);
}
{
if(servo_pos<500)
servo_pos = 500;
else if(servo_pos>2500)
servo_pos=2500;
servo_pos=((servo_pos*2)-1000);
Wire.beginTransmission(servo1);
else
Wire.beginTransmission(servo2);
Wire.write((servo_num-1)+(18*3));
Wire.write(servo_pos>>8);
Wire.write(servo_pos & 0XFF);
Wire.endTransmission();
delay(20);
}
{
if(servo_pos<500)
servo_pos = 500;
else if(servo_pos>2500)
servo_pos=2500;
servo_pos=((servo_pos*2)-1000);
Wire.beginTransmission(servo1);
else
Wire.beginTransmission(servo2);
Wire.write((servo_num-1)+(18*5));
Wire.write(servo_pos>>8);
Wire.write(servo_pos & 0XFF);
Wire.endTransmission();
}
{
Wire.beginTransmission(servo1);
Wire.write(18*2);
Wire.write(value);
Wire.write(0);
Wire.endTransmission();
Wire.beginTransmission(servo2);
Wire.write(18*2);
Wire.write(value);
Wire.write(0);
Wire.endTransmission();
delay(20);
}
{
value=3000-value;
value=value-1500;
value=-500;
else if (value>500)
value=500;
value=2000+(value*2);
else if(value<=0)
value=-value*2;
if(servo_num<19)
Wire.beginTransmission(servo1);
else
Wire.beginTransmission(servo2);
Wire.write((servo_num-1)+(18*6));
Wire.write(value>>8);
Wire.write(value & 0XFF);
Wire.endTransmission();
delay(20);
}
{
if(servo_dir>0)
servo_dir=1;
if(servo_num<19)
Wire.beginTransmission(servo1);
else
Wire.beginTransmission(servo2);
Wire.write((servo_num-1)+(18*7));
Wire.write(servo_dir);
Wire.write(0);
Wire.endTransmission();
delay(20);
}
{
int i, n;
char buffer;
Wire.beginTransmission(servo1);
n = Wire.write(181);
if (n != 1)
return (-10);
if (n != 0)
return (n);
Wire.requestFrom(servo1, 1, true);
while(Wire.available())
buffer=Wire.read();
}
{
int i, n, error;
uint8_t buffer[2];
Wire.beginTransmission(servo1);
if (n != 1)
return (-10);
if (n != 0)
return (n);
Wire.requestFrom(servo1, 2, true);
i = 0;
while(Wire.available() && i<2)
{
buffer[i++]=Wire.read();
}
if ( i != 2)
return (-11);
return (((buffer[0]*256 + buffer[1])+4)/2 +500);
}
{
int i, n, error;
uint8_t buffer[2];
Wire.beginTransmission(servo1);
if (n != 1)
return (-10);
if (n != 0)
return (n);
Wire.requestFrom(servo1, 2, true);
i = 0;
while(Wire.available() && i<2)
{
buffer[i++]=Wire.read();
}
if ( i != 2)
return (-11);
i=((buffer[0]*256 + buffer[1]));
if(i>2000)
return(3000-(((i-2000)/2)+1500));
else
return(3000-((-i/2)+1500));
}
void ServoSetAll(unsigned int Servo1, unsigned int Servo2, unsigned int Servo3, unsigned int Servo4, unsigned int Servo5, unsigned int Servo6, unsigned int Servo7, unsigned int Servo8, unsigned int Servo9, unsigned int Servo10, unsigned int Servo11, unsigned int Servo12, unsigned int Servo13, unsigned int Servo14, unsigned int Servo15, unsigned int Servo16, unsigned int Servo17, unsigned int Servo18)
{
if (Servo1 >= 500) {I2C_SERVOSET(1,Servo1);}
if (Servo2 >= 500) {I2C_SERVOSET(2,Servo2);}
if (Servo3 >= 500) {I2C_SERVOSET(3,Servo3);}
if (Servo4 >= 500) {I2C_SERVOSET(4,Servo4);}
if (Servo5 >= 500) {I2C_SERVOSET(5,Servo5);}
if (Servo6 > 500) {I2C_SERVOSET(6,Servo6);}
if (Servo7 >= 500) {I2C_SERVOSET(7,Servo7);}
if (Servo8 >= 500) {I2C_SERVOSET(8,Servo8);}
if (Servo9 >= 500) {I2C_SERVOSET(9,Servo9);}
if (Servo10 >= 500) {I2C_SERVOSET(10,Servo10);}
if (Servo11 >= 500) {I2C_SERVOSET(11,Servo11);}
if (Servo12 >= 500) {I2C_SERVOSET(12,Servo12);}
if (Servo13 >= 500) {I2C_SERVOSET(13,Servo13);}
if (Servo14 >= 500) {I2C_SERVOSET(14,Servo14);}
if (Servo15 >= 500) {I2C_SERVOSET(15,Servo15);}
if (Servo16 >= 500) {I2C_SERVOSET(16,Servo16);}
if (Servo17 >= 500) {I2C_SERVOSET(17,Servo17);}
if (Servo18 >= 500) {I2C_SERVOSET(18,Servo18);}
while (!I2C_SERVOEND())
{
delay(1);
}
LEDToggle();
}
{
if (LEDState == 0)
LEDState = 1;
else
LEDState = 0;
digitalWrite(LED, LEDState);
}
{
//------------------------------OIL SPREADING PROCESS------------------------------
ServoSetAll(2195,1246,2169,1350,1842,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500); // Line # 5
delay(300); //Default Delay
delay(800); // Line # 6
ServoSetAll(2195,1201,1980,1350,1704,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500); // Line # 7
delay(300); //Default Delay
delay(800); // Line # 8
ServoSetAll(2195,1174,1920,1350,1713,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500); // Line # 9
delay(300); //Default Delay
delay(200); // Line # 10
ServoSetAll(2195,1174,1920,1350,1713,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,2067); // Line # 11
delay(300); //Default Delay
delay(600); // Line # 12
ServoSetAll(2195,1279,1920,1350,1656,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,2069); // Line # 13
delay(300); //Default Delay
delay(600); // Line # 14
ServoSetAll(2195,1722,1920,1350,1554,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,2069); // Line # 15
delay(300); //Default Delay
delay(800); // Line # 16
ServoSetAll(1688,1546,1743,1350,1401,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,2087); // Line # 17
delay(300); //Default Delay
delay(1000); // Line # 18
ServoSetAll(1688,1792,2109,1350,1221,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,2087); // Line # 19
delay(300); //Default Delay
delay(600); // Line # 20
ServoSetAll(1622,1711,2070,1350,1203,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,2087); // Line # 21
delay(300); //Default Delay
delay(100); // Line # 22
delay(100); // Line # 23
delay(100); // Line # 24
ServoSetAll(2195,1279,1920,1350,1656,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,2093); // Line # 25
delay(300); //Default Delay
delay(800); // Line # 26
ServoSetAll(2195,1174,1920,1350,1713,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500); // Line # 27
delay(300); //Default Delay
delay(600); // Line # 28
ServoSetAll(2195,1246,2169,1350,1842,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500); // Line # 29
delay(300); //Default Delay
delay(800); // Line # 30
ServoSetAll(1781,1500,1500,1350,943,1500,1503,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500,1500); // Line # 31
delay(300); //Default Delay
delay(1000);
//------------------------------EGG SPREADING PROCESS------------------------------
ServoSetAll(1500,2045,0,2500,1500,0,955,0,0,500,0,0,0,0,0,0,0,0); // Line # 8
delay(300); //Default Delay
delay(100); // Line # 9
ServoSetAll(554,1742,0,2500,1500,0,1231,0,0,500,0,0,0,0,0,0,0,0); // Line # 10
delay(300); //Default Delay
delay(100); // Line # 11
ServoSetAll(569,1335,0,2500,1500,0,1582,0,0,500,0,0,0,0,0,0,0,0); // Line # 12
delay(300); //Default Delay
delay(100); // Line # 13
ServoSetAll(590,1281,0,2374,1500,0,1543,0,0,500,0,0,0,0,0,0,0,0); // Line # 14
delay(300); //Default Delay
delay(100); // Line # 15
ServoSetAll(569,1254,0,2332,1500,0,1594,0,0,500,0,0,0,0,0,0,0,0); // Line # 16
delay(300); //Default Delay
delay(100); // Line # 17
ServoSetAll(569,1254,0,2332,1500,0,1594,0,0,1194,0,0,0,0,0,0,0,0); // Line # 18
delay(300); //Default Delay
delay(100); // Line # 19
ServoSetAll(569,1458,0,2383,1500,0,1429,0,0,1194,0,0,0,0,0,0,0,0); // Line # 20
delay(300); //Default Delay
delay(2000); // Line # 21
I2C_SERVOSPEED(20); // Line # 22
delay(2000); // Line # 23
ServoSetAll(611,1824,0,2134,1500,0,835,0,0,1194,0,0,0,0,0,0,0,0); // Line # 24
delay(300); //Default Delay
delay(2000); // Line # 25
delay(2000); // Line # 26
ServoSetAll(1539,1824,0,2134,1500,0,835,0,0,1194,0,0,0,0,0,0,0,0); // Line # 27
delay(300); //Default Delay
delay(100); // Line # 28
ServoSetAll(1539,1431,0,1729,1500,0,835,0,0,1194,0,0,0,0,0,0,0,0); // Line # 29
delay(300); //Default Delay
delay(100); // Line # 30
I2C_SERVOSPEED(80); // Line # 31
ServoSetAll(1710,1350,0,1829,500,0,835,0,0,1194,0,0,0,0,0,0,0,0); // Line # 32
delay(300); //Default Delay
delay(2000); // Line # 33
delay(100); // Line # 34
ServoSetAll(1539,1431,0,1729,1500,0,835,0,0,1194,0,0,0,0,0,0,0,0); // Line # 35
delay(300); //Default Delay
delay(100); // Line # 36
ServoSetAll(1539,1824,0,2134,1500,0,835,0,0,1194,0,0,0,0,0,0,0,0); // Line # 37
delay(300); //Default Delay
delay(100); // Line # 38
ServoSetAll(611,1824,0,2134,1500,0,835,0,0,1194,0,0,0,0,0,0,0,0); // Line # 39
delay(300); //Default Delay
delay(100); // Line # 40
ServoSetAll(569,1458,0,2383,1500,0,1429,0,0,1194,0,0,0,0,0,0,0,0); // Line # 41
delay(300); //Default Delay
delay(100); // Line # 42
ServoSetAll(587,1284,0,2335,1500,0,1528,0,0,1194,0,0,0,0,0,0,0,0); // Line # 43
delay(300); //Default Delay
delay(100); // Line # 44
ServoSetAll(587,1272,0,2362,1500,0,1528,0,0,1194,0,0,0,0,0,0,0,0); // Line # 45
delay(300); //Default Delay
ServoSetAll(587,1245,0,2362,1500,0,1528,0,0,1194,0,0,0,0,0,0,0,0); // Line # 46
delay(300); //Default Delay
delay(100); // Line # 47
ServoSetAll(587,1245,0,2362,1500,0,1528,0,0,500,0,0,0,0,0,0,0,0); // Line # 48
delay(300); //Default Delay
delay(100); // Line # 49
ServoSetAll(584,1269,0,2380,1500,0,1576,0,0,500,0,0,0,0,0,0,0,0); // Line # 50
delay(300); //Default Delay
delay(100); // Line # 51
ServoSetAll(584,1293,0,2410,1500,0,1546,0,0,500,0,0,0,0,0,0,0,0); // Line # 52
delay(300); //Default Delay
delay(100); // Line # 53
ServoSetAll(569,1335,0,2500,1500,0,1582,0,0,500,0,0,0,0,0,0,0,0); // Line # 54
delay(300); //Default Delay
delay(100); // Line # 55
ServoSetAll(1500,2045,0,2500,1500,0,955,0,0,500,0,0,0,0,0,0,0,0); // Line # 56
delay(300); //Default Delay
delay(1000);
I2C_SERVOSPEED(75); // Line # 7
ServoSetAll(1500,2045,0,2500,1500,0,955,0,0,500,0,0,0,0,0,0,0,0); // Line # 8
delay(300); //Default Delay
delay(100); // Line # 9
ServoSetAll(2159,1715,0,2500,1500,0,1231,0,0,500,0,0,0,0,0,0,0,0); // Line # 10
delay(300); //Default Delay
delay(100); // Line # 11
ServoSetAll(2192,1398,0,2500,1500,0,1626,0,0,500,0,0,0,0,0,0,0,0); // Line # 12
delay(300); //Default Delay
delay(100); // Line # 13
ServoSetAll(2192,1248,0,2338,1500,0,1582,0,0,500,0,0,0,0,0,0,0,0); // Line # 14
delay(300); //Default Delay
delay(100); // Line # 15
ServoSetAll(2192,1230,0,2287,1500,0,1552,0,0,500,0,0,0,0,0,0,0,0); // Line # 16
delay(300); //Default Delay
delay(100); // Line # 17
ServoSetAll(2192,1230,0,2287,1500,0,1552,0,0,1178,0,0,0,0,0,0,0,0); // Line # 18
delay(300); //Default Delay
delay(100); // Line # 19
ServoSetAll(2192,1302,0,2311,1500,0,1540,0,0,1178,0,0,0,0,0,0,0,0); // Line # 20
delay(300); //Default Delay
I2C_SERVOSPEED(30); // Line # 21
delay(100); // Line # 22
ServoSetAll(2192,1779,0,2500,1500,0,1390,0,0,1178,0,0,0,0,0,0,0,0); // Line # 23
delay(300); //Default Delay
I2C_SERVOSPEED(50); // Line # 24
delay(100); // Line # 25
ServoSetAll(1645,1779,0,2500,1500,0,1390,0,0,1178,0,0,0,0,0,0,0,0); // Line # 26
delay(300); //Default Delay
delay(100); // Line # 27
I2C_SERVOSPEED(30); // Line # 28
ServoSetAll(1666,2180,0,2500,1500,0,527,0,0,1178,0,0,0,0,0,0,0,0); // Line # 29
delay(300); //Default Delay
delay(100); // Line # 30
ServoSetAll(1666,2000,0,2500,1500,0,527,0,0,1178,0,0,0,0,0,0,0,0); // Line # 31
delay(300); //Default Delay
ServoSetAll(1666,1973,0,2500,1500,0,617,0,0,1178,0,0,0,0,0,0,0,0); // Line # 32
delay(300); //Default Delay
ServoSetAll(1666,1856,0,2377,1500,0,662,0,0,1178,0,0,0,0,0,0,0,0); // Line # 33
delay(300); //Default Delay
ServoSetAll(1666,1823,0,2371,1500,0,698,0,0,1178,0,0,0,0,0,0,0,0); // Line # 34
delay(300); //Default Delay
ServoSetAll(1666,1745,0,2386,1500,0,998,0,0,1178,0,0,0,0,0,0,0,0); // Line # 35
delay(300); //Default Delay
ServoSetAll(1666,1685,0,2386,1500,0,1040,0,0,1178,0,0,0,0,0,0,0,0); // Line # 36
delay(300); //Default Delay
delay(100); // Line # 37
ServoSetAll(1639,1514,0,2212,1461,0,1163,0,0,1178,0,0,0,0,0,0,0,0); // Line # 38
delay(300); //Default Delay
delay(100); // Line # 39
ServoSetAll(1639,1679,0,2212,1461,0,1115,0,0,1178,0,0,0,0,0,0,0,0); // Line # 40
delay(300); //Default Delay
delay(100); // Line # 41
ServoSetAll(940,1679,0,2212,1461,0,1115,0,0,1178,0,0,0,0,0,0,0,0); // Line # 42
delay(300); //Default Delay
delay(100); // Line # 43
I2C_SERVOSPEED(45); // Line # 44
ServoSetAll(940,1451,0,2212,1461,0,893,0,0,1178,0,0,0,0,0,0,0,0); // Line # 45
delay(300); //Default Delay
delay(100); // Line # 46
ServoSetAll(940,1679,0,2212,1461,0,1115,0,0,1178,0,0,0,0,0,0,0,0); // Line # 47
delay(300); //Default Delay
delay(100); // Line # 48
ServoSetAll(1500,2045,0,2500,1500,0,955,0,0,1194,0,0,0,0,0,0,0,0); // Line # 49
delay(300); //Default Delay
ServoSetAll(2184,2045,0,2500,1500,0,955,0,0,1194,0,0,0,0,0,0,0,0); // Line # 50
delay(300); //Default Delay
delay(100); // Line # 51
ServoSetAll(2192,1241,0,2317,1500,0,1564,0,0,1194,0,0,0,0,0,0,0,0); // Line # 52
delay(300); //Default Delay
delay(100); // Line # 53
ServoSetAll(2192,1274,0,2317,1500,0,1564,0,0,1194,0,0,0,0,0,0,0,0); // Line # 54
delay(300); //Default Delay
delay(100); // Line # 55
ServoSetAll(2192,1241,0,2317,1500,0,1564,0,0,1194,0,0,0,0,0,0,0,0); // Line # 56
delay(300); //Default Delay
delay(100); // Line # 57
ServoSetAll(2192,1241,0,2317,1500,0,1564,0,0,500,0,0,0,0,0,0,0,0); // Line # 58
delay(300); //Default Delay
delay(100); // Line # 59
ServoSetAll(2192,1271,0,2395,1500,0,1555,0,0,500,0,0,0,0,0,0,0,0); // Line # 60
delay(300); //Default Delay
delay(100); // Line # 61
ServoSetAll(1500,2045,0,2500,1500,0,955,0,0,500,0,0,0,0,0,0,0,0); // Line # 62
delay(300); //Default Delay
delay(1000);
}
{
// Comment or remove the next 5 lines to run code in loop...
while(1)
{
ipstate = digitalRead(ipfromesp);
if(ipstate == HIGH)
{
MoveServos();
}
LEDToggle();
delay(100);
}