
Robots and robotics have always been one of the fascinating field of studies for scientists, engineers and makers. And so now days they are playing important roles in automation in almost every field, and doing some very critical tasks like surgeries, driving cars, etc. Today we are sharing an interesting robot for hobbyists and makers: ArduRoller, ArduRoller is a self-balancing robot and also capable of autonomous navigation indoors or out. Jason Short developed this for SparkFun Autonomous Vehicle Competition.
ArduRoller mainly uses APM 2.5 autopilot from 3D Robotics and Arduino Pro Mini. APM Autopilot is the heart of this project, it is a Hardware board with a software running in it, and acts as a Brain, Eyes, Ear of the Robot. It has all the necessary sensors embedded in it like gyros, accelerometers, and magnetometers. It has inbuilt support for GPS and telemetry to run the robot in Autonomous mode. It is a great hardware and any moving machine can be turned into a Robot using this Hardware package.
Two brushed DC motors, with their Encoders attached, are used as wheels and two soft tires have been fixed with these motors. So now Arduino Pro Mini reads the data from Encoders and sends them to APM 2.5 autopilot via a I2C interface. Then autopilot controls the movement and the balance of the Robot. To manually control the Robot a R/C PPM Receiver has been connected to Autopilot so that it can controlled wirelessly via RC transmitter.

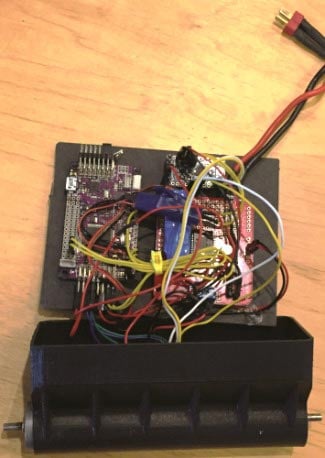

All the hardwares are connected together as shown above. This whole setup has been fixed on a Foam board and fixed into 3-D printed custom case of black color. A round Glass dome has been attached on the top, with a puppet inside it, which makes it looking really cool.
For Autonomous Operation, Mission Planner software (for Windows PC) or DroidPlanner (for Android) can be used. Mission Planner software is used to send the Robot on autonomous missions with the help GPS and Google Maps, and its speed, location and direction can be tracked. Further a GoPro can be attached to record video of the Robot’s vision.

Source code for Autopilot and Arduino Pro Mini has been given by Jason on his GitHub account. You can burn Autopilot following this procedure.
If you have the all the hardwares ready then you can make it hardly in 3-4 hours. It may be expensive, especially APM autopilot is the costliest, but you can surely reuse all the components and it is a great fun to build your own Advanced Self balancing Robot.

thanks for the post,please we need how to build a cnc machine.thanks in advance